In scenes of disordered picking from deep bins or similar scenarios, after the vision system recognizes and locates the pose of an object, sometimes it identifies another object ‘B’ overlapping above the recognized object ‘A’ but fails to detect it. How can we determine the overlap in a vision project to prevent collisions when the robot picks up an object? Is it possible to provide a corresponding visual module for reference in future projects?
In scenarios like the one described in the question, we typically employ the Extract 3D Points in Cuboid Step or the Extract 3D Points in Cyliner Step. For detailed information on the Steps, see Extract 3D Points in Cuboid and Extract 3D Points in Cylinder.

These steps extract point clouds base on the given pose, differing only in shape. The figure below illustrates a cuboid instance.
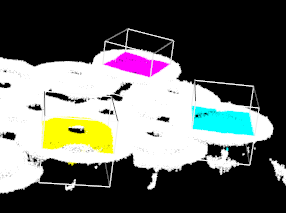
This method can determine if another piece overlaps the one you intend to select.
Also you have the option to adjust the pose to change the position of the cuboid and cylinder.