Note: If you are using an older version of Mech-Eye SDK, please upgrade to the latest version.
How to use HALCON for SDK development?
Answer: Currently, you can directly control the camera with HALCON. Please refer to HALCON: Connect to Camera, Perform Image Capturing, and Adjust Parameters for more information.
How to use VisionPro for SDK development?
Answer: Support for VisionPro is currently in the testing phase. Once testing is complete, it will be adapted into the release version.
How to implement interface functionality?
Answer: You can refer to Mech-Eye C++ API for information on implementing interface functionality. Additionally, after installing the software, you can refer to the “readme” file and remarks in example programs.
What are the formats for saving depth maps, 2D images, and point clouds?
Answer: Multiple saving formats are available for your convenience. In the example program, OpenCV is used to save depth maps and 2D images, allowing you to utilize the formats supported by OpenCV. For point clouds, PCL is used for saving, thus enabling you to employ the formats supported by PCL.
Does the Mech-Eye API’s capturing time vary when using different programming languages?
Answer: The difference in capturing time is almost negligible.
What is the number of channels in the saved depth map?
Answer:
- First, it is important to understand the data types in OpenCV matrix data, in which the format is specified as CV_<bit_depth>(S|U|F)C<number_of_channels>. Here’s a breakdown of the format:
- bit_depth: This part indicates the number of bits used to store each value, which defines the bit depth of the image. For most images, the typical depth is 8 bits, representing an 8-bit color depth.
- S|U|F: This part represents the data type used for the pixel values. ‘S’ stands for signed int (signed integer), ‘U’ stands for unsigned int (unsigned integer), and ‘F’ stands for float (single-precision floating-point).
- C<number_of_channels>: This part specifies the number of channels in the image. For instance, a grayscale image (grayImg) is a single-channel image, an RGB color image is a three-channel image, and an RGB image with an Alpha channel is a four-channel image.
- To illustrate the saving methods for 2D images and depth maps in Mech-Eye API example programs, please refer to the screenshot below:
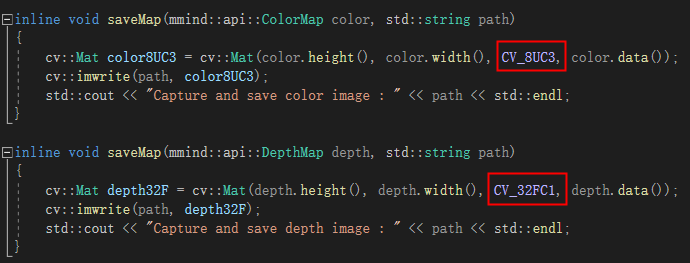
- In the saving method for 2D images, CV_8UC3 represents an 8-bit unsigned integer three-channel matrix.
- In the saving method for depth maps, CV_32FC1 represents a 32-bit floating-point single-channel matrix.
For more information about data types, please refer to Image data format in Mech-Eye API.