Good Day!
I would like to ask if automatic collision avoidance feature exist in MechViz or MechVision?
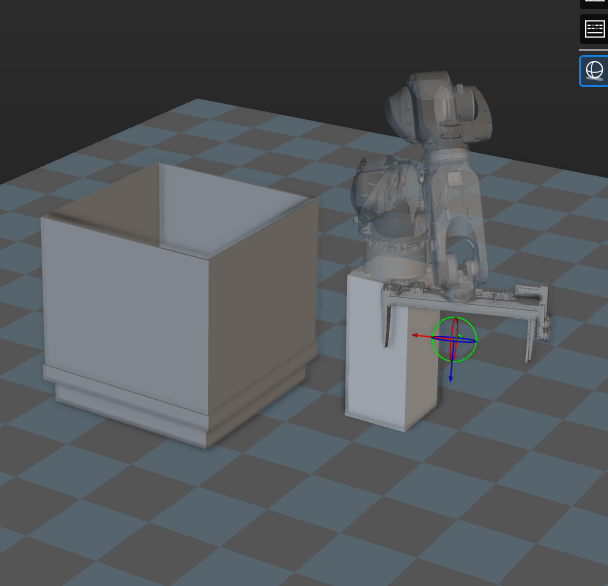
I would like to move robot from this pose
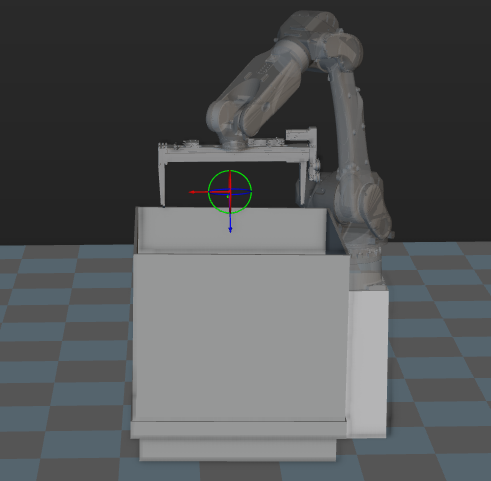
Up to this pose
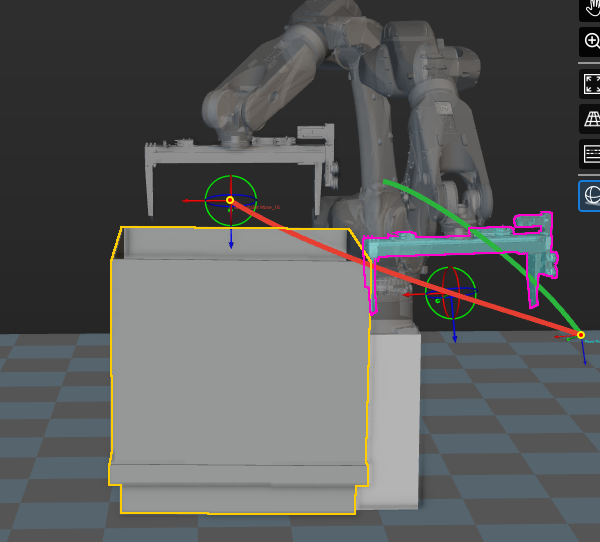
But there is a collision midway with the box and tool
It got me thinking if there might be a feature something like automatically creates additional pose to dodge scene object and then proceed to target pose.
In this current set-up i can just manualy add a fixed point in between to dodge the box. I just wanted to ask if the feature exist since the feature will be the key to the future project i am thinking of.
Regards,
Carl
Hi Carl,
Yes, Mech-Viz includes built-in collision detection and avoidance as part of its path planning. Here’s how it works:
-
Collision models — You set up 3D collision models for the robot, end tool, workpieces, and scene objects (bins, fixtures, etc.) in the Mech-Viz project.
-
Automatic path planning — When Mech-Viz plans the robot’s motion path, it automatically checks for collisions and generates a collision-free path. If a collision is detected during planning, Viz will attempt to find an alternative path.
-
Point cloud collision detection — Viz can also use the real-time point cloud captured by the camera as a collision object, so even dynamic/unknown obstacles can be accounted for.
For configuration details, please refer to:
So to directly answer your question — yes, you don’t need to manually plan every waypoint to avoid obstacles. Mech-Viz handles collision avoidance automatically based on the collision models you configure.
Let me know if you need help setting it up!
In the current case, what steps should i do to implement this automatic path planning?
both links returns a 404 Page Not Found
Hi Carl,
The AI Assistant got the steps right but let you down on the links.
Try this link Topic: Collision Detection
Hope that helps,
Peter