Optimal Matching Strategy:
- Perform coarse positioning using edge matching first, followed by fine positioning with surface matching.
- Select only the most distinct point cloud features with better consistency and intensity for the model.
- Ensure maximum consistency between the scene and the model by removing irrelevant background noise and extraneous point clouds.
Case Study:
- Use edge matching to locate the workpiece position.

- Map multiple grasping points onto the curved surfaces of the workpiece.
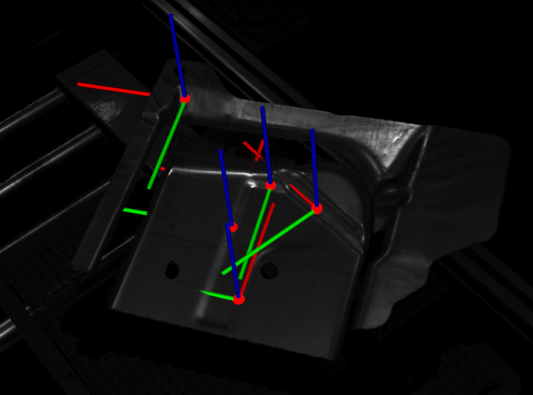
- Extract the corresponding curved surface point clouds.

- Finally, apply fine matching.
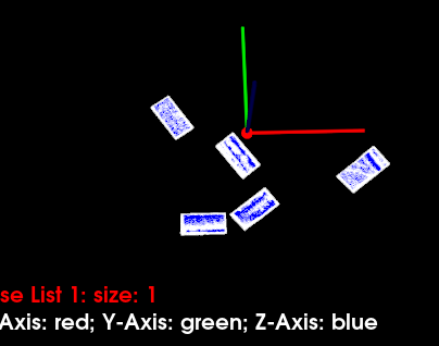
Additionally, all projects must utilize pose repeatability precision testing via statistical data checks to verify repeat matching accuracy. The recommended optimal value for pros is less than [quote=“Giallo, post:1, topic:3115, full:true”]
Optimal Matching Strategy:
- Perform coarse positioning using edge matching first, followed by fine positioning with surface matching.
- Select only the most distinct point cloud features with better consistency and intensity for the model.
- Ensure maximum consistency between the scene and the model by removing irrelevant background noise and extraneous point clouds.
Case Study:
- Use edge matching to locate the workpiece position.
- Map multiple grasping points onto the curved surfaces of the workpiece.
- Extract the corresponding curved surface point clouds.
- Finally, apply fine matching.
Additionally, all projects must utilize pose repeatability precision testing via statistical data checks to verify repeat matching accuracy. The recommended optimal value for pros is less than 0.1mm when capturing images at a 1-meter distance.
Range:
