For using Master Control, you can follow this link in the docs:
https://docs.mech-mind.net/en/suite-software-manual/latest/vision-tools/add-pick-point-by-teaching.html
For using the Standard Interface, clicking on the ‘Fetch current pose’ will not work. You will need to manually input the current flange pose in the format of Quaternions or Euler angles.
For robot in the following brands, we will need to add the z-offset to the z value while teaching the pick point.
Taking Yaskawa GP25 as an example:
-
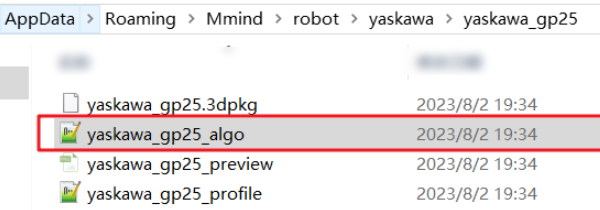
Access the robot folder from Mech-Viz:
-
Open the “yaskawa_gp25_algo”, and check the “base_z_offset” value.
-
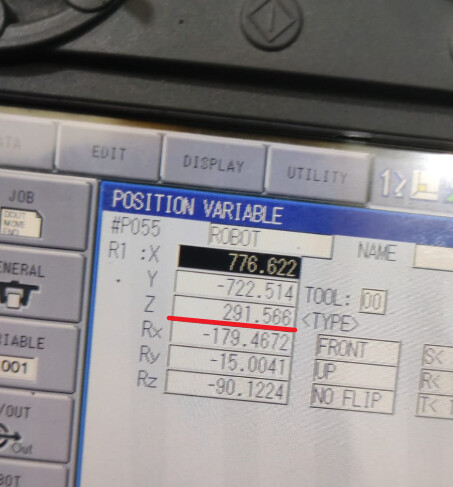
Add this value to the z: 291.566+505 = 796.587
-
Input the z value calculated into Mech-Vision:



The reason why we need to compensate for this offset can be found here.