For updated contents, refer to docs: How to update bin pose in Mech-Viz?
1. Introduction
In the newly-released Mech-Vision and Mech-Viz softwares, the bin recognition and locating function in deep bin picking scenarios has been greatly improved in terms of usability. This passage introduces two methods for dynamically locating bins in Mech-Viz.
2. Adding scene object
Open a Mech-Viz project, click + beside the Scene objects to open the Scene Object Configuration window, select Bin for the Scene model, and enter the Object dimensions for the bin based on its actual dimensions.

3. Methods for updating bin
In Mech-Viz 1.8.0, there are two methods for updating the bin:
- Define the bin as a scene object, then use the Update Scene Object Step to update the bin.
- Directly use the Re-locate Bin with Vision feature provided in the Vision Move Step to re-locate the bin.
3.1 Update Scene Object
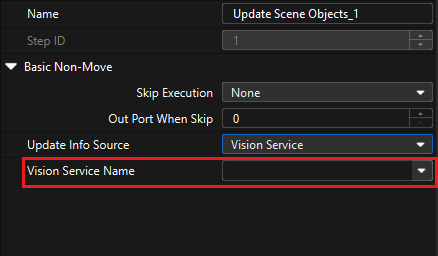
For the Update Scene Objects Step, there are two options for the Update Info Source parameter: Config Value and Vision Service. For detailed information on this parameter, see Update Info Source.

-
If you select the Config Value option, add the newly added bin model to the Scene Object, and enter the target pose and target size as instructed in Config Value.
-
If you select the Vision Service option, the data of the bin needs to be sent from Mech-Vision. Perform the following steps to configure the Vision Service:
-
Select the Mech-Vision project that provides the bin recognition service for the Vision Service Name parameter.
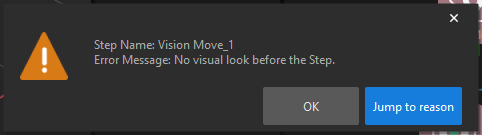
Note: The Mech-Vision projects used for bin recognition and workpiece recognition must be two separate projects. If they share the same project, and the project is utilized by the Update Scene Object Step, there will be no project for the subsequent Vision Move Step, and an error as shown below will occur in Mech-Vision.
-
In Mech-Vision, set the parameters of Procedure Out Step as instructed in Vision name. The figure below is an example of connecting the object data to the input ports of Procedure Out.
-


3.2 Vision Move
-
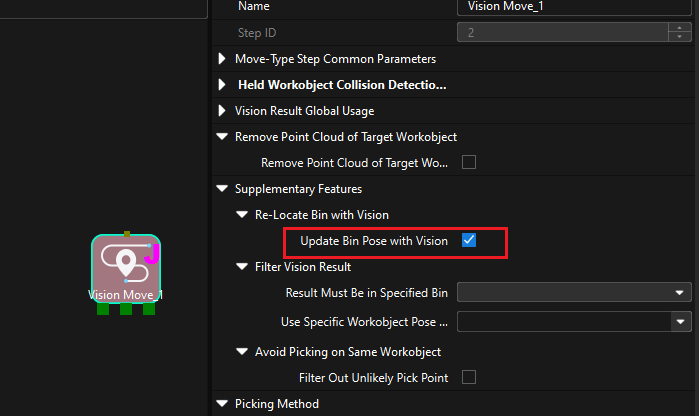
Select Update Bin Pose with Vision feature for the Vision Move Step. For detailed information on this feature, see Re-Locate Bin with Vision section in Supplementary Feature.
-
In Mech-Vision, set the parameters of Procedure Out Step as instructed in Vision name.
Tip:
For actual deep bin picking scenarios, since the Vision Service source option in 3.1 Update Scene Object Step requires two separate projects, which involves additional efforts, we recommend using 3.2 Vision Move Step to locate the bin.
4. Multiple scene objects
In some cases, a project may contain multiple scene objects. As shown below, the scene objects include a bin and a cylinder.
To dynamically locate multiple scene objects, enter names, dimensions, and poses of the objects to the Procedure Out Step in Mech-Vision, and ensure that they correctly correspond to each other, so that Mech-Viz can dynamically update multiple object poses in the simulation area.
