Background
In projects with high accuracy requirements, the accuracy of the TCP will directly affect the accuracy of the robot’s performance. Therefore, after completing vision calibration and tool mounting, TCP calibration is necessary for the tool of the robot.
There are various methods for TCP calibration, and this passage mainly introduces FANUC’s three-point calibration method, where the coordinate axis orientations of the tool remain consistent with the coordinate axis orientations of the robot flange.
Procedures
Select the Three-Point Method
-
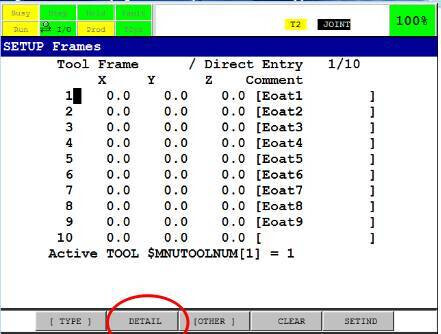
Click SETUP → Frames on the main menu.
-
Click DETAIL on the bottom of the SETUP Frames interface.
-
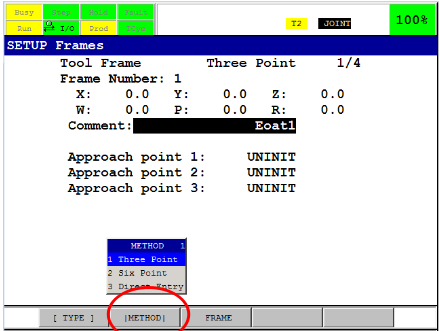
Click METHOD, and select the Three Point in the drop-down list.
-
Press Enter to open the three-point method interface.

Steps for the Three Point Method
-
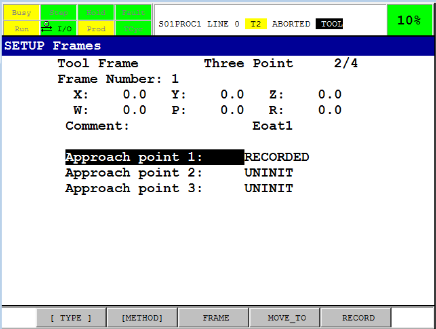
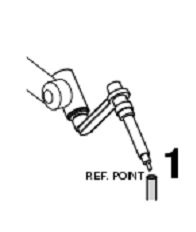
Record the approach point 1
a. Move the cursor to Approach point 1 on the three-point method interface;
b. Click FRAME to switch to the WORLD frame, then move the robot so that the tip of the tool touches the reference point, as shown in the figure below;

d. Press SHIFT + F5 (RECORD) to record this point. -
Record the approach point 2
a. Move the cursor to Approach point 2 on the three-point method interface;
b. Click FRAME to switch to the JOINT frame, then rotate the J6 axis (the flange surface) of the robot by at least 90 degrees, no more than 360 degrees;
c. Switch back to the WORLD frame, then move the robot so that the tip of the tool touches the reference point;
d. Press SHIFT + F5 (RECORD) to record this point. -
Record the approach point 3
a. Move the cursor to Approach point 3 on the three-point method interface;
b. Click FRAME to switch to the JOINT frame, then rotate the J4 axis and J5 axis of the robot by no more than 90 degrees;
c. Switch back to the WORLD frame, then move the robot so that the tip of the tool touches the reference point;
d. Press SHIFT + F5 (RECORD) to record this point. -
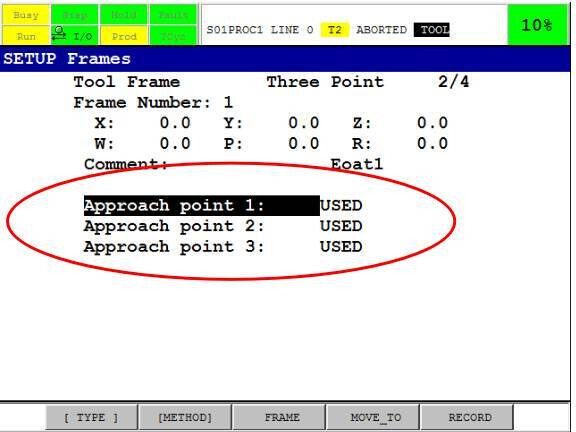
Save the data
After the three points are recorded, the new coordinates of the tool are automatically calculated and generated.
All the three approach points are now marked as USED on the teach pendant, as shown below: