In an Mech-Eye sensor integration testing, a customer encountered the following problem:
The RGB data returned by captureColorMap or capturePointXYZBGRMap methods appears to be from the previous sensor scan, regardless of the time elapsed between two captures. This problem does not occur with XYZ data.
Here are the details related to the problem:
-
Problem scenario example: Scanning an empty table for the first time, and then scanning again after placing a pen on that table.
-
Software: SDK 2.1.0 with API C#.
-
Configuration: Using the “Default” configuration from the attached configuration file.
-
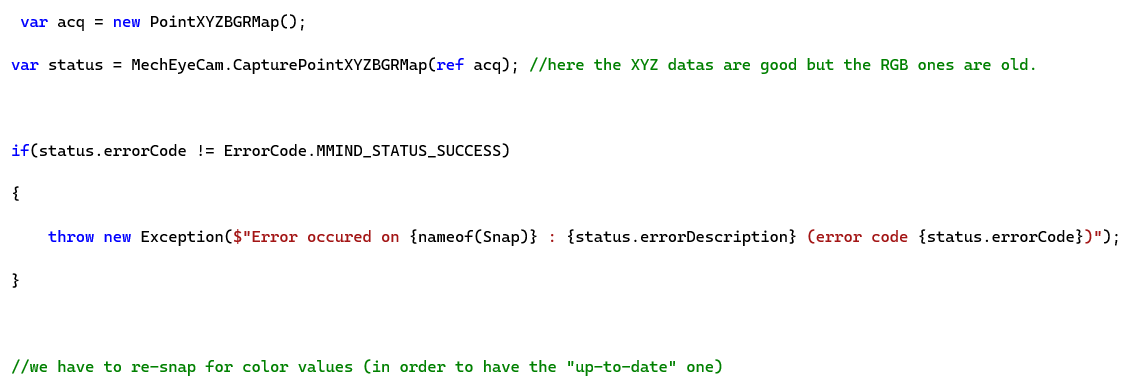
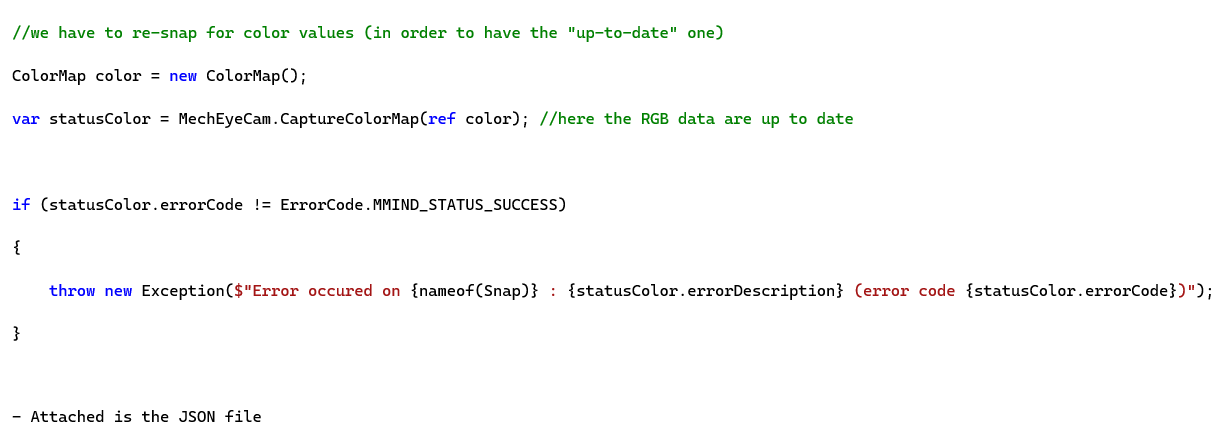
Sample code:
-
JSON file:
UAM30233A423E002_parameter_group.json (11.4 KB)