Problem
When following the Manual for Setting up Standard Interface Communication with YASKAWA to load the Standard Interface program files to the robot, an error message displays: ERROR 3220: Syntax error in instruction data [58] (J:mm_sample L:0010).
Possible cause
The robot’s axis configuration in the program files does not match the actual configuration of the robot.
Solution
-
Back up a program file (JBI file) from the robot on the site.
-
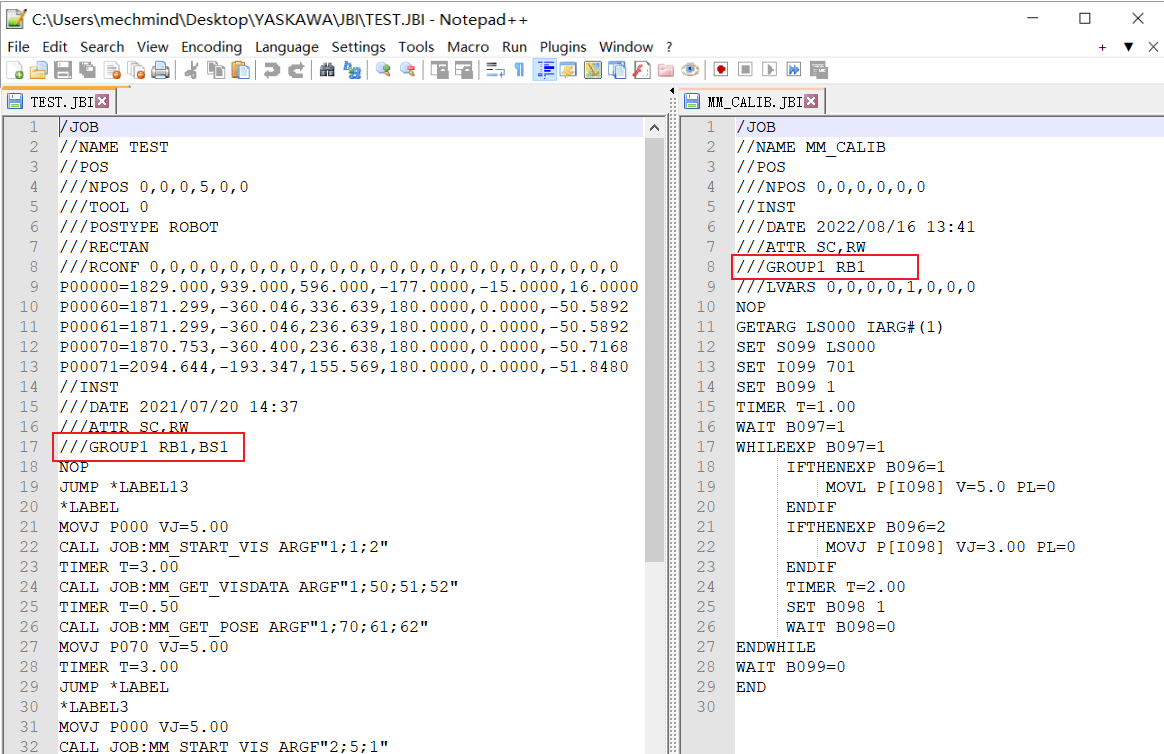
Open the backup program file and Mech-Mind program file (JBI file) with Notepad++ for comparison.
For example, as shown in the figure below.It can be observed that the axis configuration in the on-site program on the left has an additional external axis compared to the Mech-Mind program. To load the program successfully, you need to copy the axis configuration information in the on-site program to replace the axis configuration information in the Mech-Mind standard interface program.
-
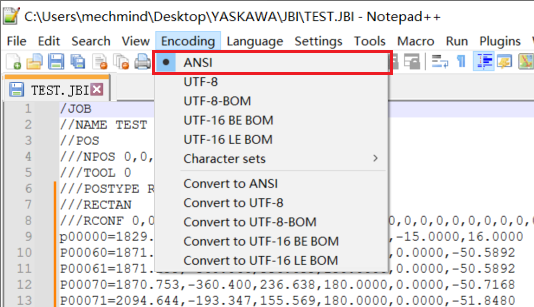
Save the modifications in Notepad++ with ANSI encoding format.
-
Modify all the standard interface programs (JBI program files) as instructed above, then re-load them to the on-site robot.