In the simulation, the robot operates as expected, yet in the actual execution, the robot deviates from the anticipated path.
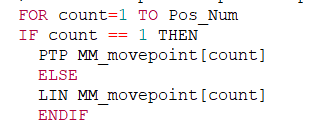
In the sample scripts of stanard interface of KUKA, we will move the point from Mech-Viz by command
![]()
But actually we will not only sent LMove, we will also sent JMove. So we should adjust the command in sample scripts according to the Mech-Viz step. Such as the first move is Jmove: