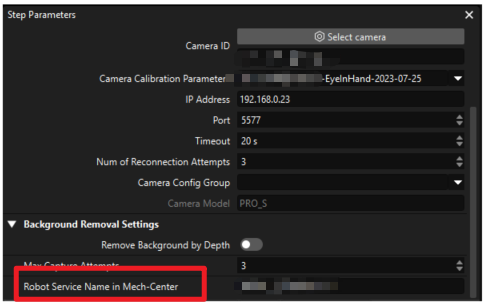
Capture Images from Camera_1: Error: The current calibration method is EIH, and the robot pose cannot be obtained. Solution: 1. If Mech-Vision is started independently, please click “Robot and Communication” in the menu bar and check if the robot model set in “Robot and Interface Configuration” is the same as the “Robot Service Name” of this Step. 2. If Mech-Center is started, please check if the “Robot Service Name” of this Step is the same as the robot service name registered in Mech-Center. 3. Please check if the robot installation package file is in the Robot Library of the software resources.
I recently updated from 1.6.1 to 1.7.4.
I start a Mech Center in Standard interface, I chose robot UR UR_5E, and then go to Mech Vision to build a project, at the very beginning of the project, on the capture image step, when I set up camera and calibration file. However, if I run the step with default calibration file, it runs no problem, however, I went through calibration and created new calibration file, when I choose new calibration file, I get and error in the image capture step.
My camera is Nano and our set up is Eye in Hand