Problem seen:
- Intrinsic parameter checking passed and manual calibration selected, but the calibration board cannot be detected until raising the calibration board.
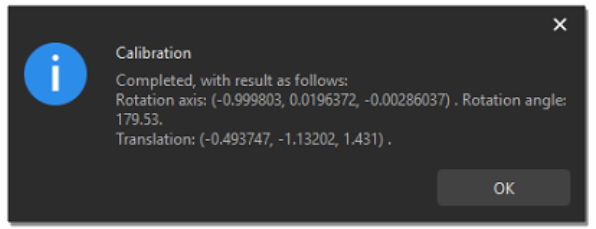
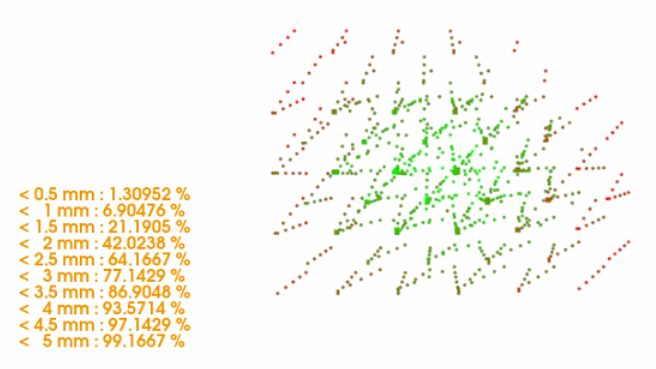
- In calibration, obvious deviations were detected in multiple calibration poses, and the final calibration accuracy worse than 5 mm (99.8%).
Setup:
- Robot model: FANUC_M_10ID_12
- Camera model: Pro M V4
- Camera mounting: ETH
- Calibration board: BDB-6
- Software version: Mech-Vision 1.7.0, Mech-Eye Viewer 2.0.2
- Distance from calibration board to camera: about 2300 mm
How to deal with the situation that the calibration board cannot be detected sometimes?
And how to improve the calibration accuracy when it cannot meet the requirements?
Reason for calibration board detection failure:
- Calibration board not in the recommended working distance of the camera
- Or camera scanning parameters not set properly.
Reason for low calibration accuracy:
- Unstable installation that leads to shaking of calibration board.
Please firmly install the calibration board, or increase the waiting time for taking pictures, that is, let the camera capture images only after the robot has finished moving and the calibration board has stopped shaking.
How to ensure that the calibration board can be detected in calibration:
-
Optimal working distance for Mech-Eye Pro M V4:1000 mm to 2000 mm.
-
Adjust camera parameters in software Mech-Eye Viewer before calibration to avoid overexposure and underexposure and ensure the cross mark in the middle of the circle can be clearly seen.
-
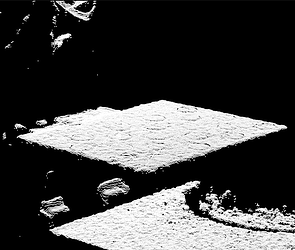
The point cloud of the calibration board is complete, and the point clouds of the white circles can be distinguished by naked eyes.
-
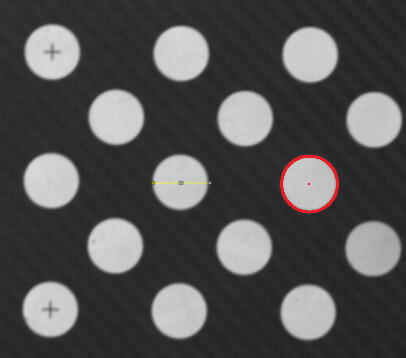
Intrinsic parameter checking: The intrinsic parameters can be rechecked by drawing aid circles.
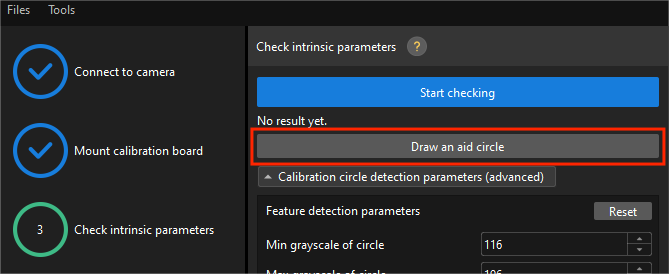
The red circle below is an example of an aid circle
How to improve calibration accuracy:
- Make sure the camera is installed firmly without shaking, and that the calibration board is also installed stably.
- Adjust the waiting time of the robot to ensure that the calibration board is still when being captured during calibration.
- Make sure that the accuracy of the robot meets the requirements.