We are curently doing a bin picking project with ProM camera, Eye in Hand, mech-Vis/Viz version 2.1.2 and YASKAWA robot. We doing standard interface comand MM_START_VIZ - MM_SET_BRANCH - MM_GET_VIZDATA - MM_GET_POS. We want to get the number of detected object from mech-Viz to reduce cycle time. So the robot does not need to capture the bin after the last object was picked. How can we do that?
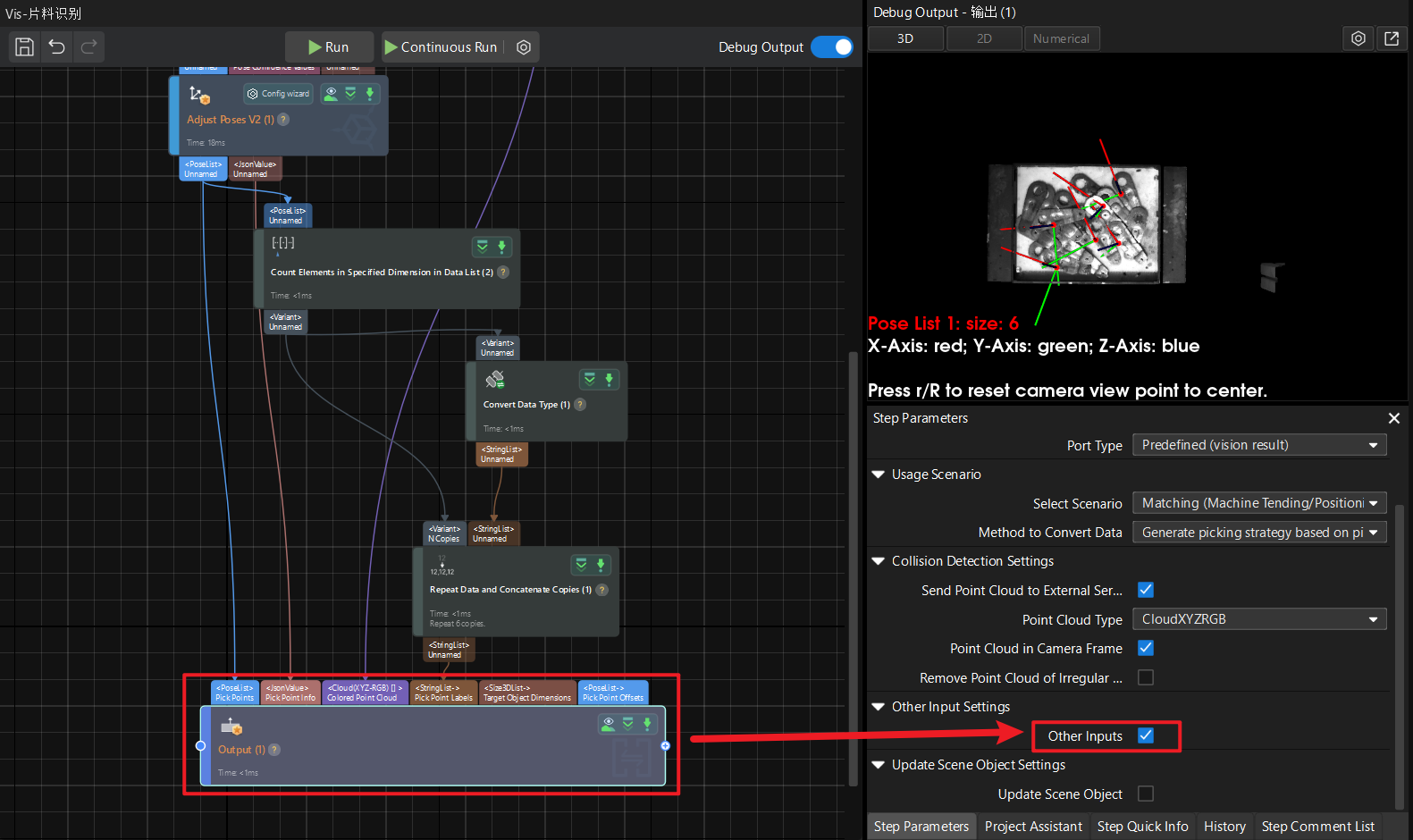
You can use the step Count Elements in Specified Dimension in Data List to count the number of detected objects, and then the step Convert Data Type to convert the result to a string list. This allows you to send the count as part of the pick point labels.
Note that all Mech-Vision outputs must be in a one-to-one correspondence. To ensure the number of pick points matches the number of labels, you will need to use the step Repeat Data and Concatenate Copies.
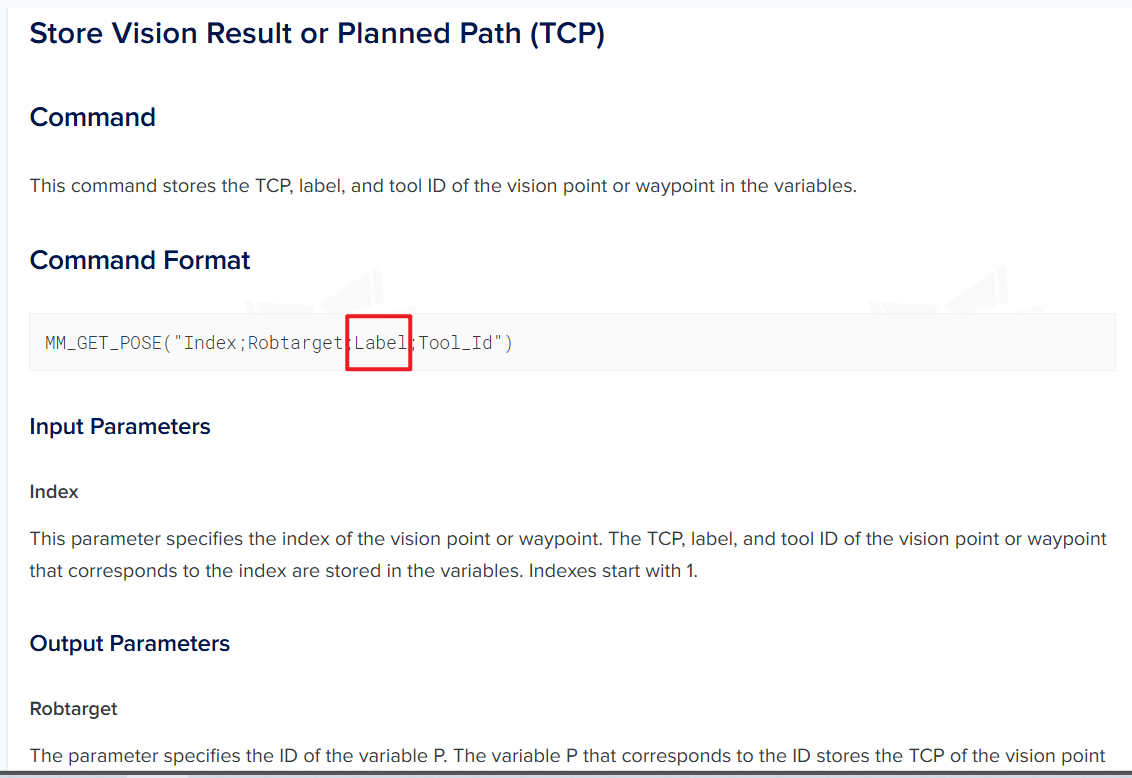
Finally you can get the label by MM_GET_POS : YASKAWA Standard Interface Commands.
1 Like