Software Version : 1.8.3
Robot : Dobot CR5
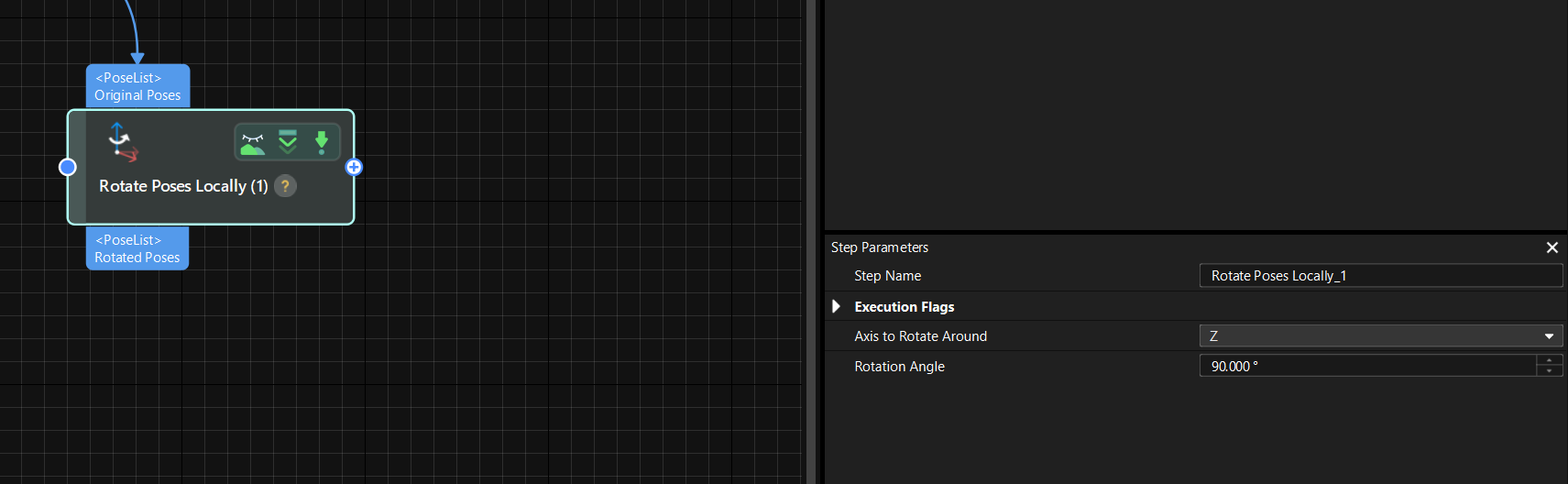
How can i get like pick point without rotation RX, RY :
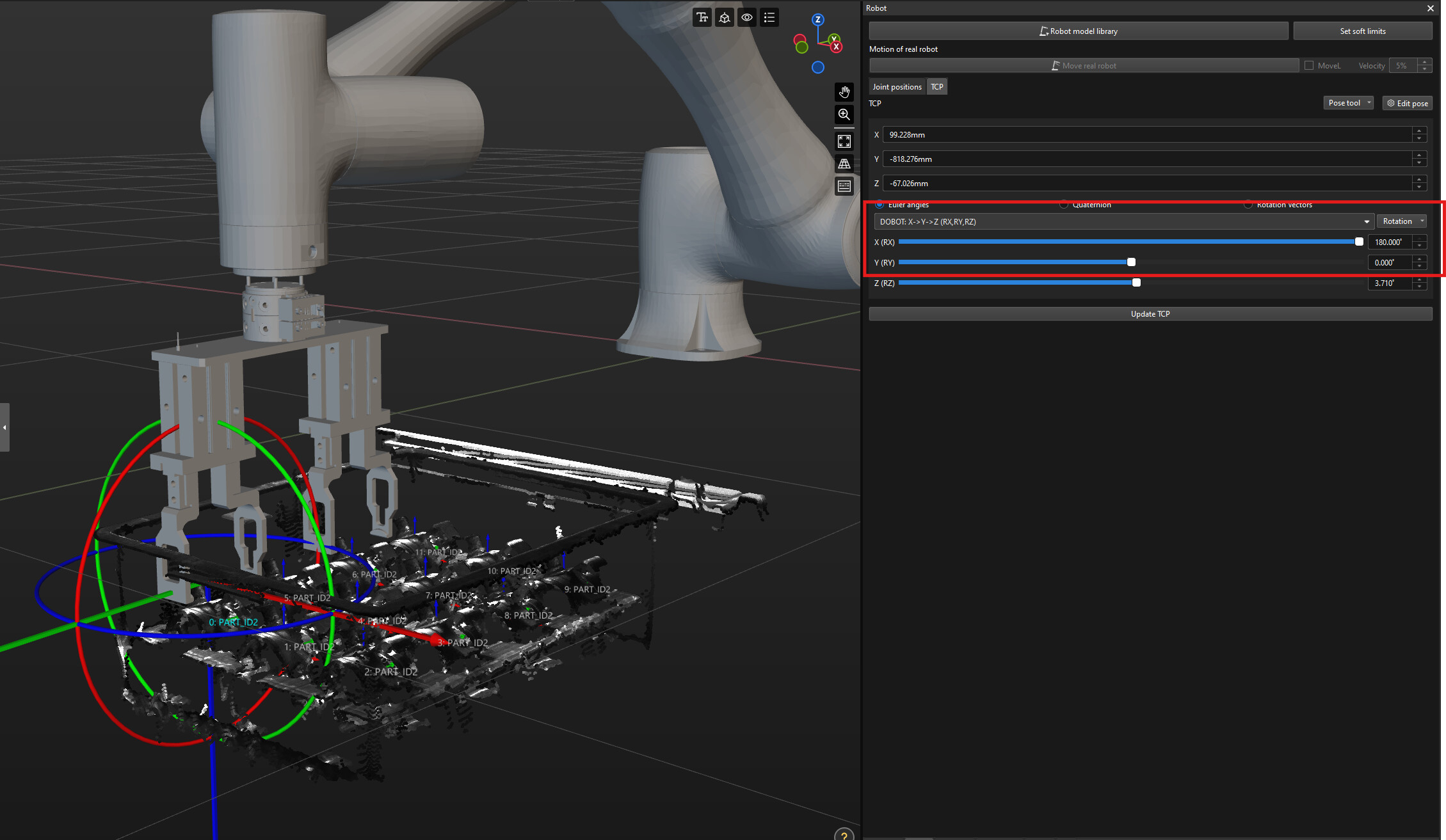
TCP NOW : [99.228, -818.276, -67.026, 177.759, -13.885, 3.710]
TCP NEED : [99.228, -818.276, -67.026, 180.00, 0.00, 3.710]
Thanks
Project File : backup_20251009170621_183.7z