Sorry for the inconvenience—here is the definitive fix.
Root cause
Mech-Viz only reads poses that are explicitly packaged inside the WorkObject data structure. If your custom output omits WorkObject, the pose is invisible to Mech-Viz and the project refuses to run.
Step-by-step solution (no code changes required)
-
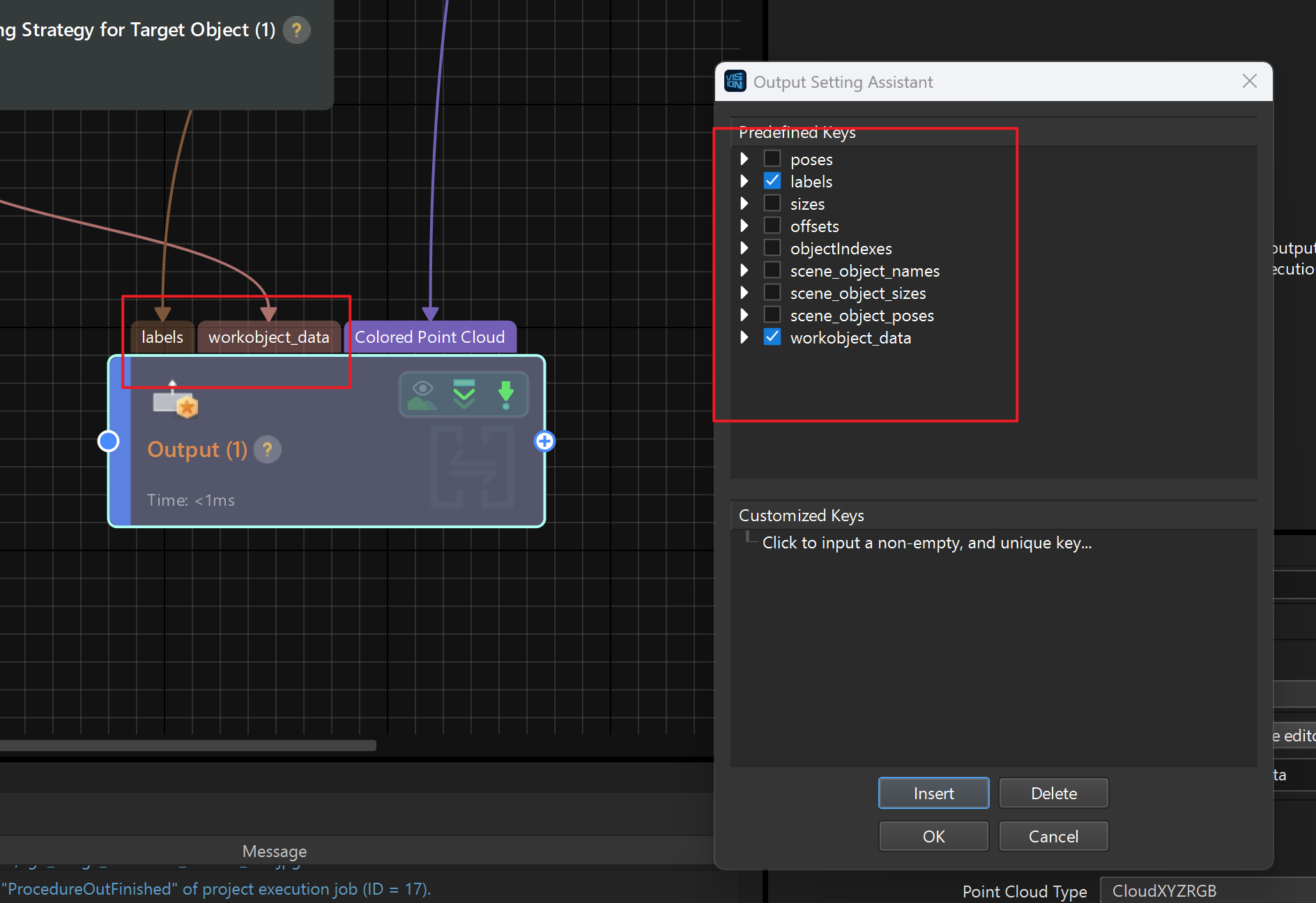
In Mech-Vision, open the Output step.
-
Tick “Enable WorkObject data in output”.
-
Under “Labels to send out”, check the labels you actually need (usually “pose”, “id”, etc.).
-
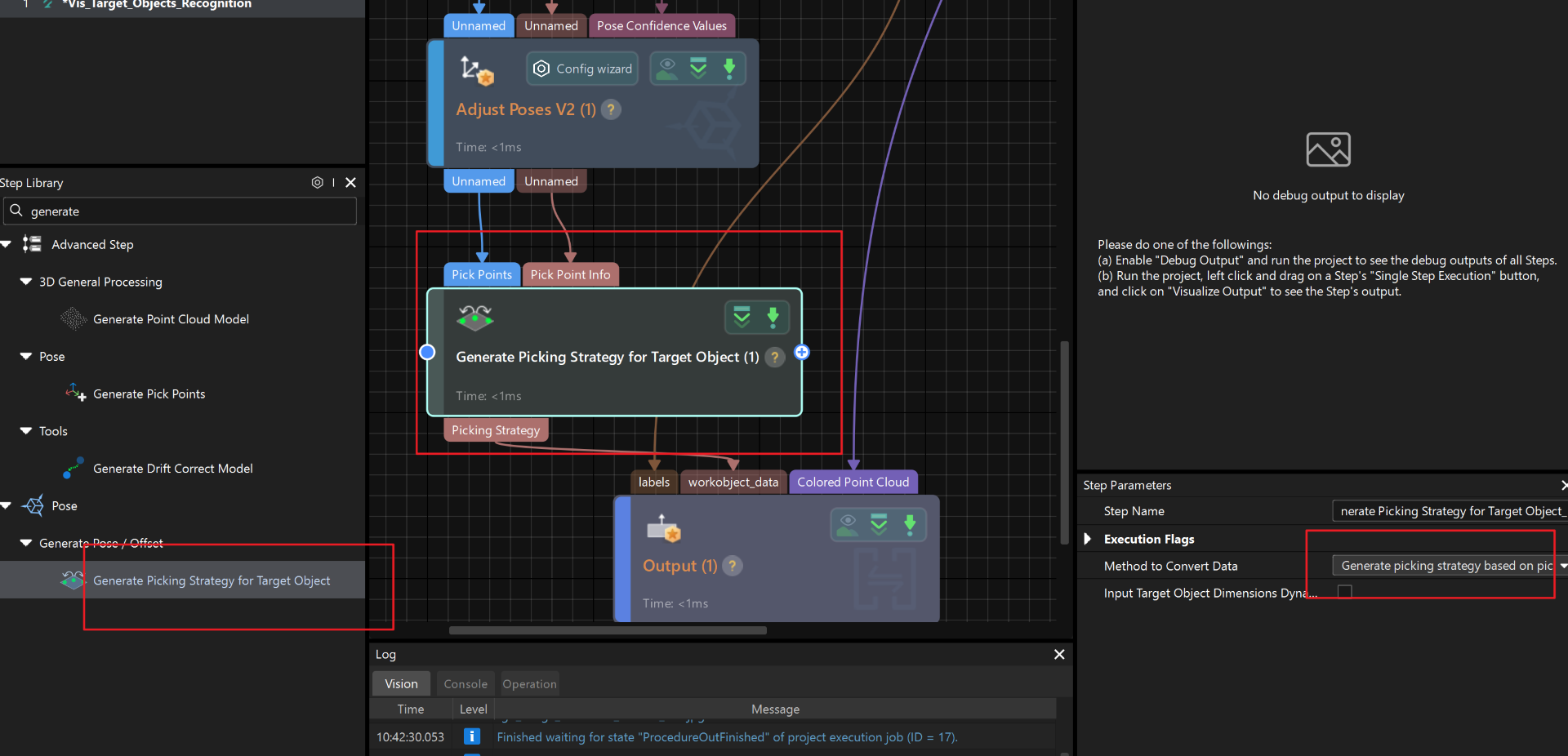
Add the step “Generate Picking Strategy for Target Object”.
• Inside this step, set “Select based on picking point”.
-
Draw a connection from the “Generate Picking Strategy” step to the “WorkObject_data” port of the Output step.
-
Save and redeploy.
Result
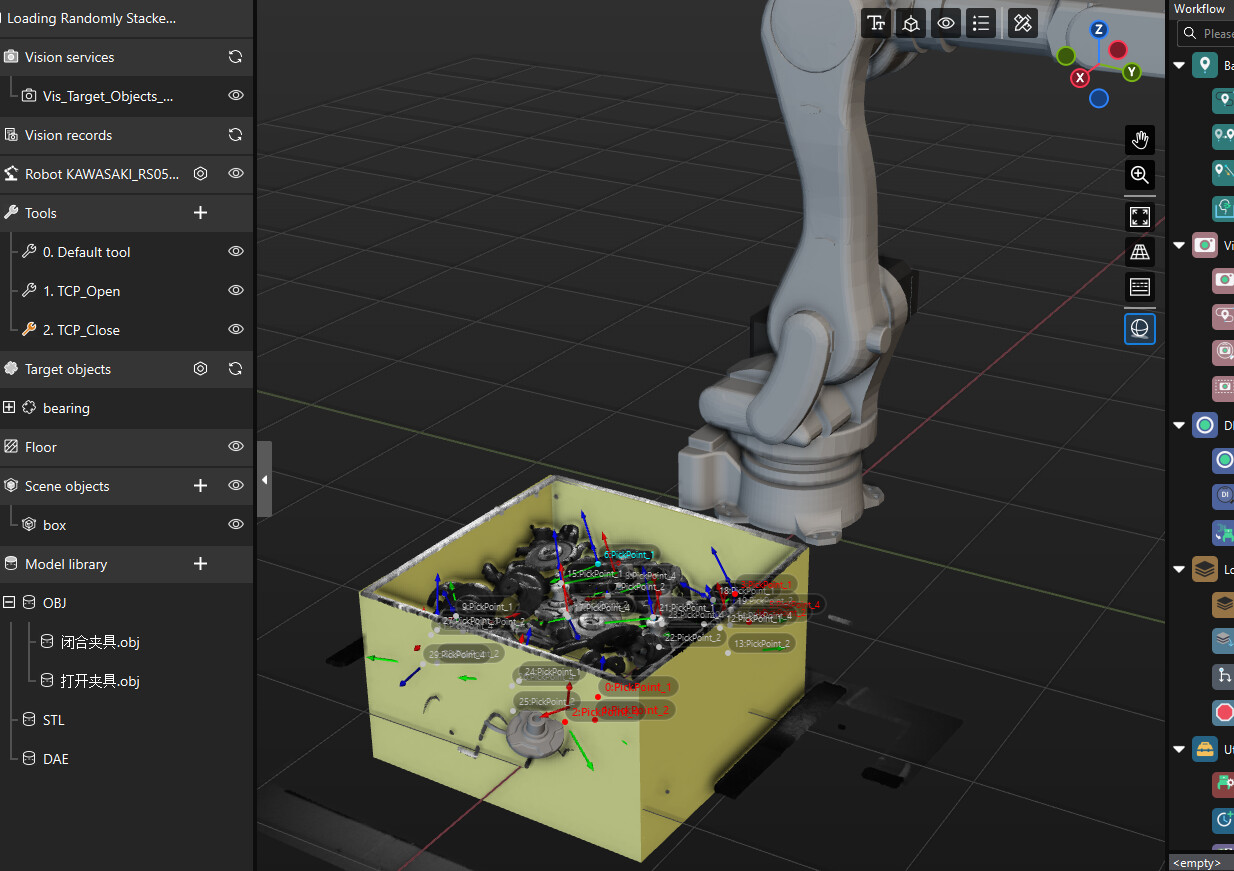
Mech-Viz now receives a properly formed WorkObject containing the pose and starts without errors.
That’s all—happy picking!