This post explains the following two questions.
What does the accuracy displayed after the hand-eye calibration complete mean? What is the reference significance for the actual grasping accuracy?

- The specific meaning of hand-eye calibration accuracy
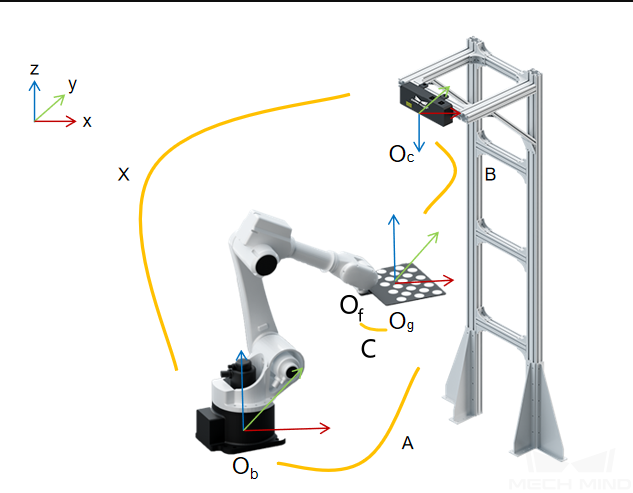
Taking Eye To Hand as an example, we use Ob to represent the robot coordinate system, Og to represent the calibration plate coordinate system, Oc to represent the camera coordinate system, and Of to represent the flange coordinate system. A represents the positional relationship between the flange and the robot coordinate system, B represents the positional relationship between the calibration plate and the camera, C represents the positional relationship between the calibration plate and the flange, and X represents the positional relationship between the camera and the robot coordinate system, that is, the external parameters. Among them, A is obtained by obtaining the current pose of the robot, B is obtained by identifying the calibration board with the camera, and C and X are fixed values, which are obtained through external parameter calculation.
The center feature point Pg on the calibration board can be transformed into the robot coordinate system Ob through two transformation paths, and the point in the robot coordinate system is represented as Pb:
(1) Og → Oc → Ob, that is, Pb = XBPg;
(2) Og → Of → Ob, that is, Pb’ = ACPg;
The two conversion channels form a closed loop, and the extrinsic precision represents the statistical value of the difference between Pb and Pb’ of all the feature points collected. Ideally, the representations of Pb and Pb’ are identical, ie the error is zero. - Practical significance
Calibration accuracy covers all factors including extrinsic parameters, robot pose, and camera acquisition accuracy. Within the calibration range, the calibration accuracy can represent the accuracy of the entire robot vision system. Actual grasping results should agree with what the calibrated accuracy shows throughout the action space.