Hello,
using MechViz in Master communication mode. DeepL Camera. Camera and Robot Movements work well.
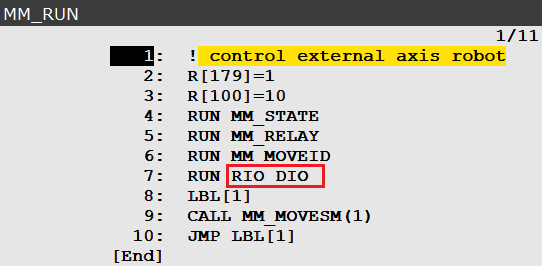
Now want to control Gripper (Open/Close). Tried all 64 DO that MechViz shows. Nothing is switching any Port in End of Arm Tooling connector EE. Measured all wit multimeter. Don’t know how to get signal to the gripper. We can switch Digital Outputs which can be seen on the Touch Pendant. But we need a physical 24V pin to change.
Any suggestion how to do?
Otherwise, without using gripper, the system cannot work.
Thank you