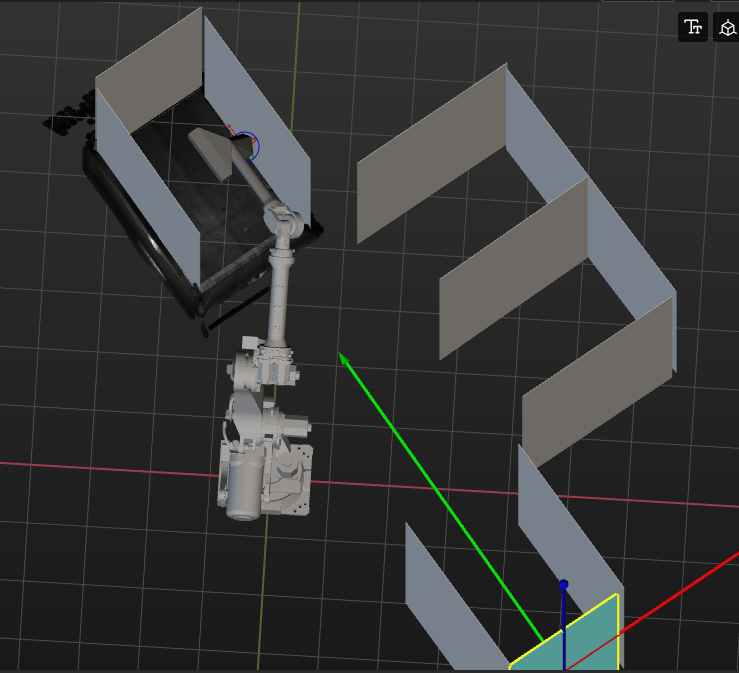
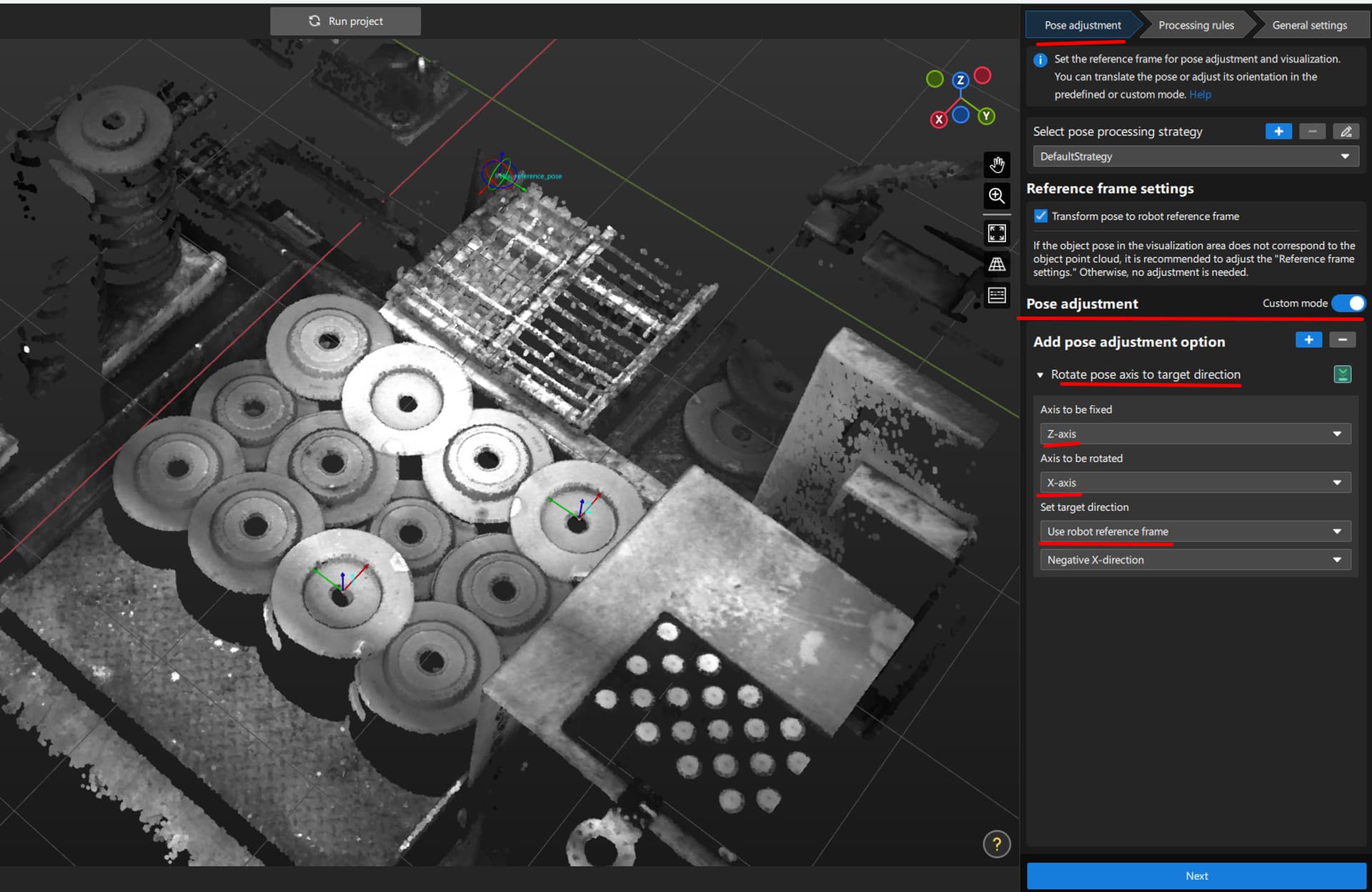
Hello. we are done doing Eye in Hand setup with mech eye LSR-L camera. the robot is going to pick a car disk brake inside a bin. the bin is inside a cabin (like i show in the image below). we are using simple mech vision step: capture - 3D matching - adjust post - procedure out. to avoid collision with the cabin wall, we need to make the X axis of the found part to be align with X axis of the TCP or Camera Frame. how can we do that?