Hi, everyone.
I would like to split up the project and use it while providing detailed operation instructions from the Adapter.
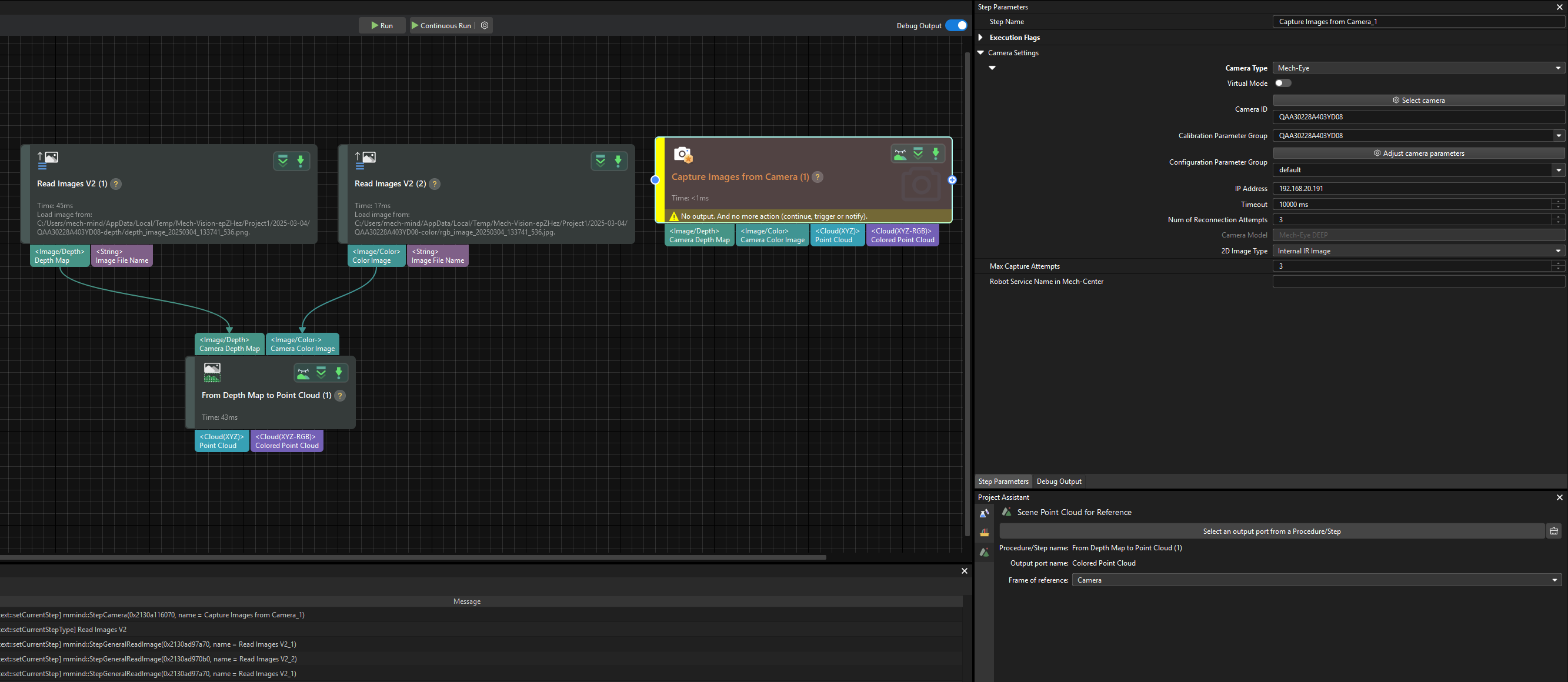
However, if the “Capture Image from Camera” step is missing, a warning is displayed, and steps such as “From Depth Map to Point Cloud” cannot be used. (Is it possible that the internal parameters are not properly applied to the project?)
Additionally, when using a virtual camera, an error pop-up appears, causing operational issues for the system.
Is there a way to avoid this issue?
- Is there a way to use “From Depth Map to Point Cloud” and similar steps without the “Capture Image from Camera” step?
- Is there a way to prevent error pop-ups when using a virtual camera?
- Software version (Mech-Vision, Mech-Viz, Mech-Eye Viewer)
Mech-Vision : 2.1.0