Hello. I am facing an issue in standard interface communication between Mechvision and TMFlow. I am using a Nano-Ultra Camera and a TM20X cobot.
I think it has something to do with Data Types but I will describe my issue in full below:
I have setup a Mech-Vision Project as per the backup here: ![]() backup_20250224134538_183.zip
backup_20250224134538_183.zip
I used a sample of general workpiece picking.
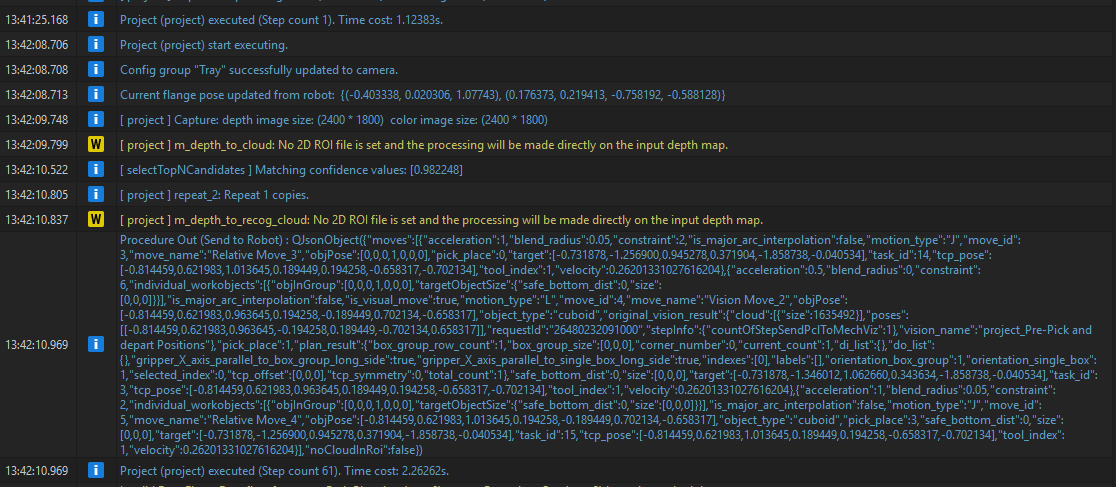
When I run the project via TMFlow in the actual robot, the vision project runs and seems to even show that parts are detected and an output string is generated (as seen in the logs below):
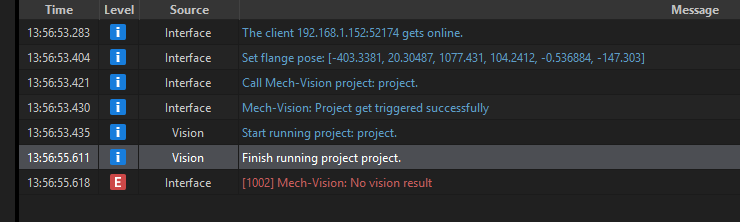
However, the console shows an error of 1002: no vision result.
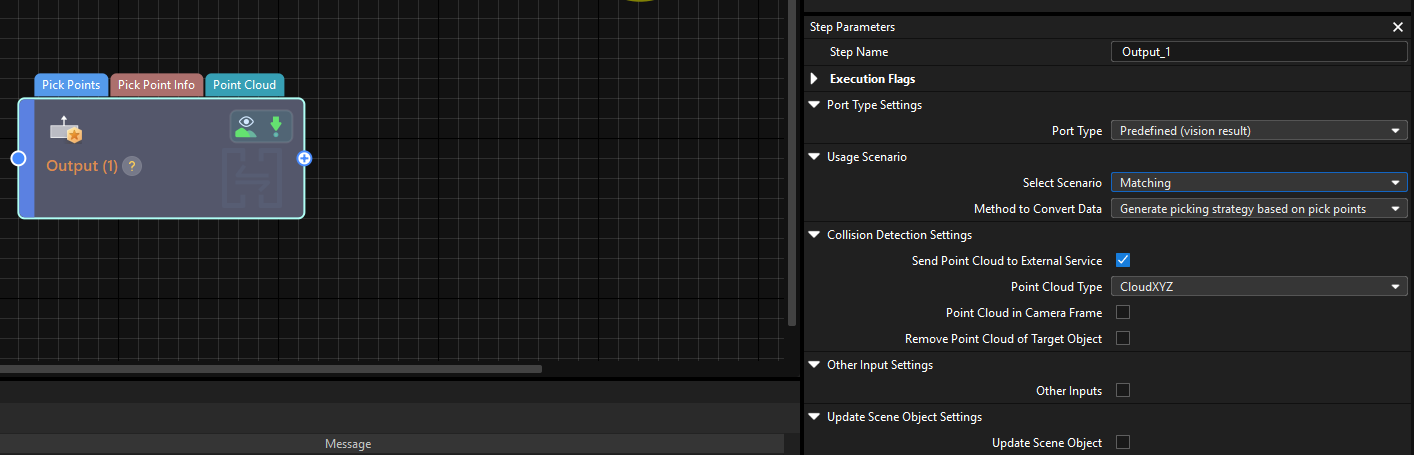
I believe I am just missing a critical step in formatting the output as per TM requirements.
I checked the error code page: Status Codes and Troubleshooting however for my error it is only giving a troubleshooting step as if the object was not detected, however, as you can see, the object is detected.
Please let me know if I have made any mistakes in my project.
PS: the backup I sent has output type “robot Path”, I have tried both “Robot path” and “Vision Results”