I’m working on a project
between Aubo i5 robot and Mech-vision 2.0.0 software of Mech-Mind. I’m looking at the List of robot brands supported by the Mech-Mind Vision System’s Standard Communication Interface and don’t see the Aubo robot brand. Looking forward to your feedback, thank you
Aubo robot standard interface is under developing. What kind of system you are using? PE or ARCS
1 Like
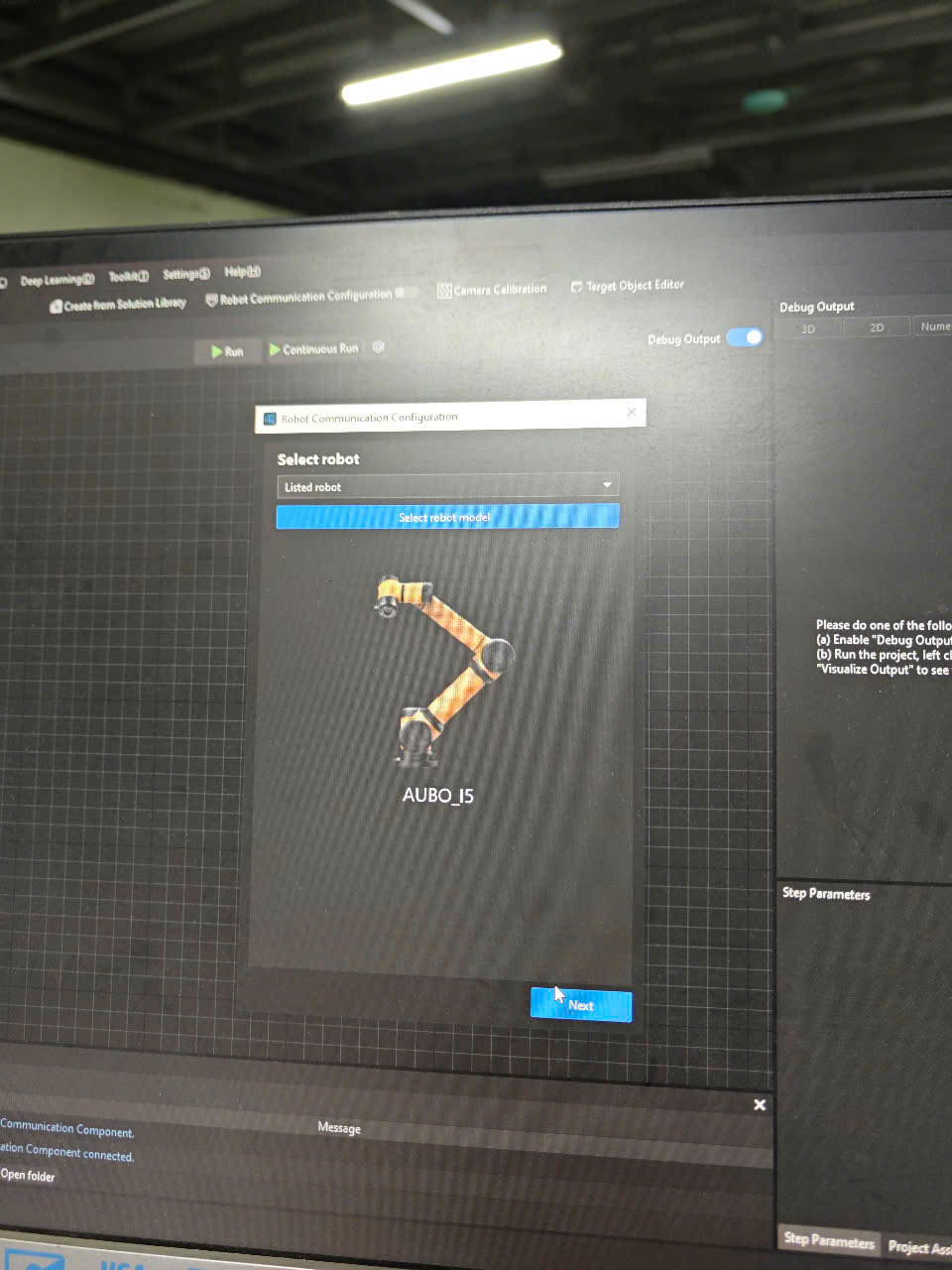
I don’t understand PE and ARCS, please explain. I’m stuck in the “robot communication configuration” section. How to connect Aubo to Mech-Mind’s mech-vision.
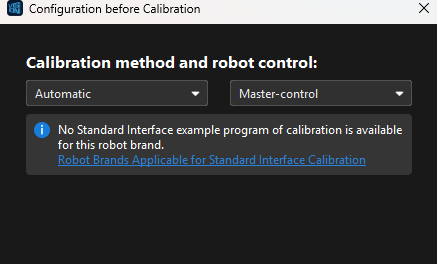
As it’s shown here, we don’t have AUBO standard interface program ready. We plan to finish it in the next release.
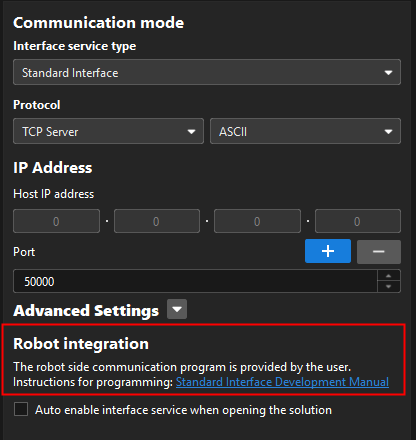
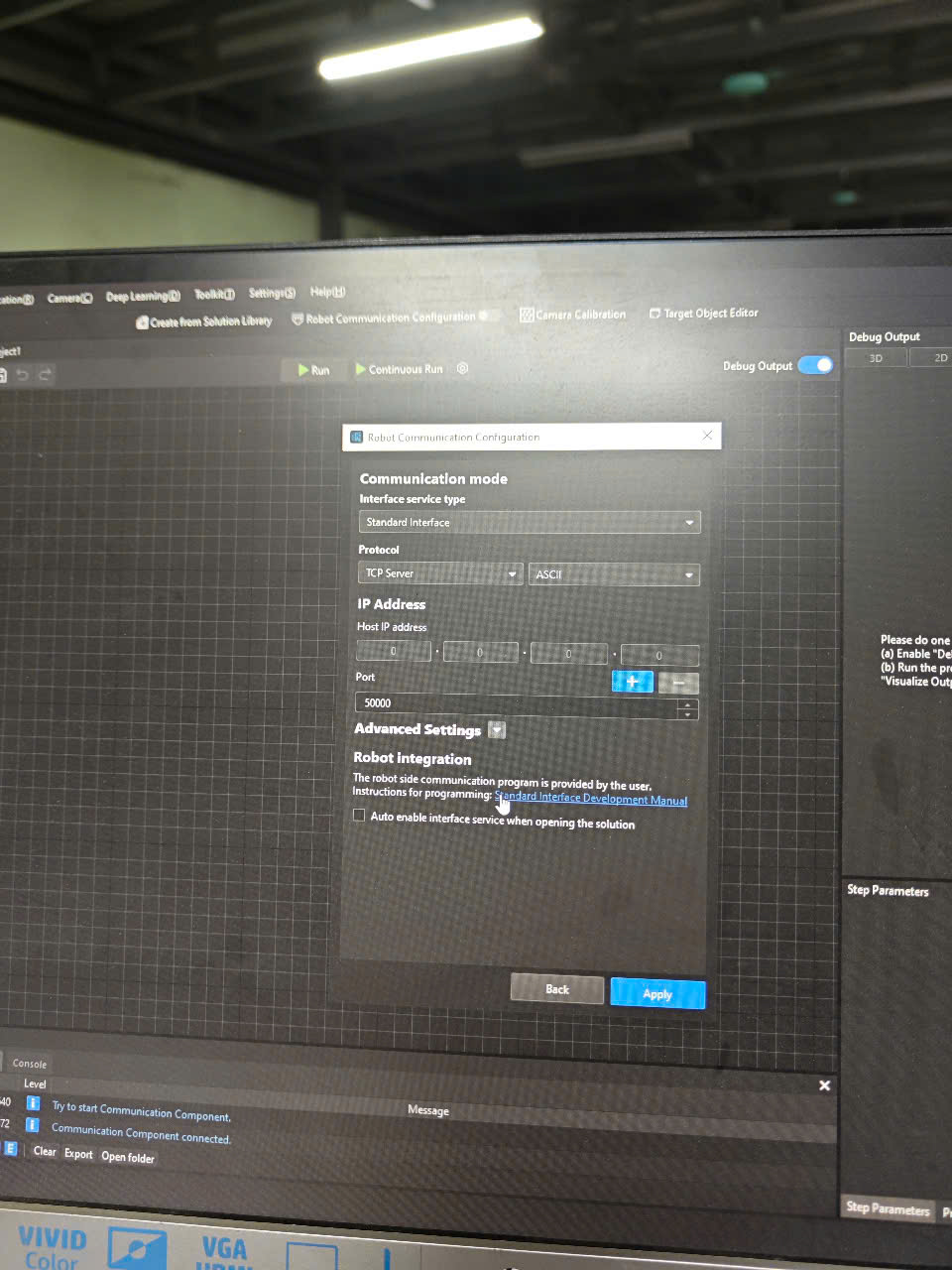
To communicate with an Aubo robot, the user needs to create the robot TCP/IP communication program.
Method 1: Follow the standard interface developer manual to create the robot program. TCP/IP Interface Commands
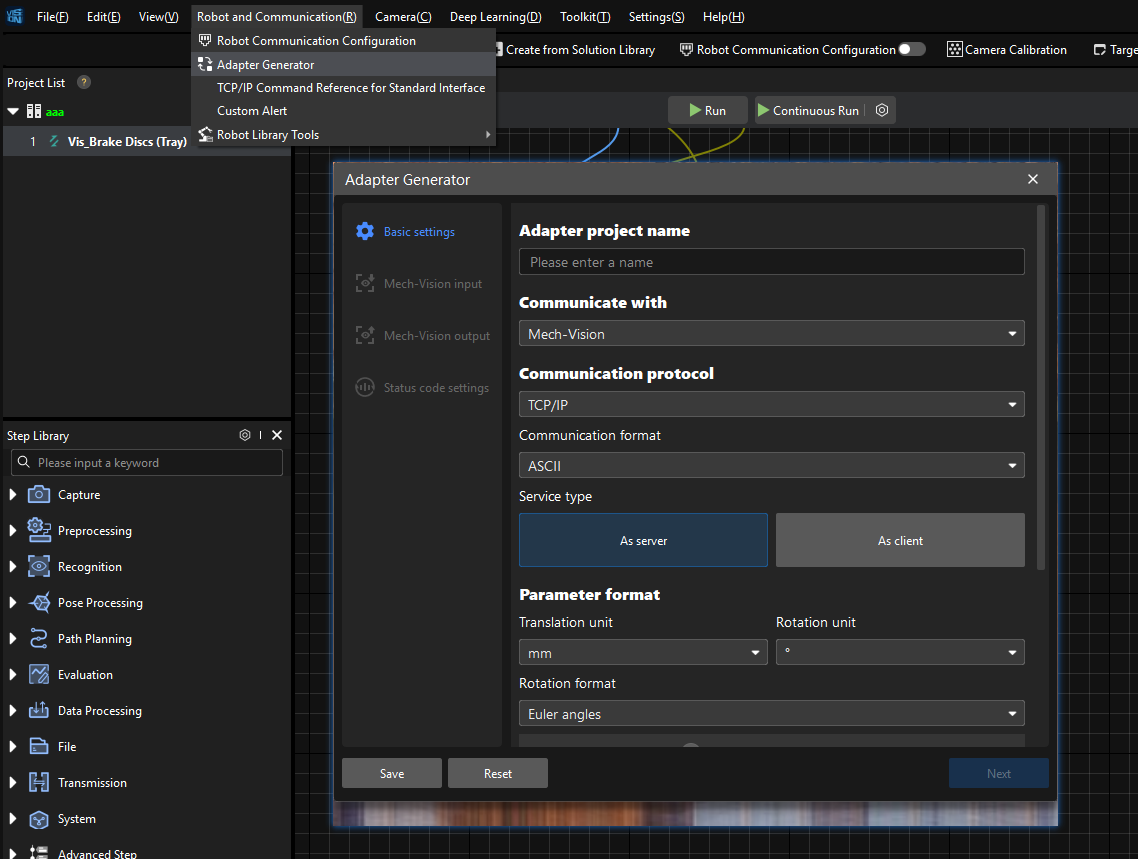
Method 2: Use the Adapter generator to generate a simple communication protocol, then create the corresponding robot-side program.
1 Like
Thank you . I want to calibrate a robot or calibrate hand-eye, can Mech-viz software satisfy it, or is it required Mech-vision.
You need Mech-Vision Calibration tool.
Aubo master control is available for calibration. Master-Control Communication Setup