Hello everyone, have a nice afternoon. I am working on a project about an AGV vehicle with an integrated robot arm to pick up and release workpieces. I am using IPC Mech-Mind computer with Mech-vision 2.0.0, Mech viz 2.0.0 software. My robot is equipped with grippers to pick up and release workpieces. Although I have successfully connected the robot to the IPC and can control the axes, I still cannot control the gripper because I don’t have the tool yet. In your opinion, how can you control the robot gripper? If you have a robot gripper tool, please send it to me
Thank you very much, looking forward to your response
Hi LongShao,
You need to connect the gripper control signal to the robot and use the “master control” to control the robot’s DO signal to operate the gripper’s opening and closing.
You can use set DO to control robot DO signal in viz.

Refer to docs:Set DO
1 Like
Hello Haochen. Thank you for your feedback. But the project I’m doing uses electric clamps. Not pneumatic. Hope you can support me now. Thank you very much

Anyway, connect the gripper’s control signal to the robot and use the robot’s DO (digital output) to control the gripper. The type of robot gripper does not matter.
1 Like
Thank you for responding to me. I have one more question that I hope you can answer. When I ordered the IPC, 2 USBs were included. I think that’s the software license. The software that appears is only Mech Vision 2.0.0, Mech Viz 2.0.0, Mech MSR 2.0.0. I tried to search in drive C but there is no Mech DLK software in this software package. Although the USB label has the DLK pattern printed on it. I tried to open Microsoft Edge to access Mech-Mind to download Mech DLK but it didn’t work. Hope you can support me, thank you!!!
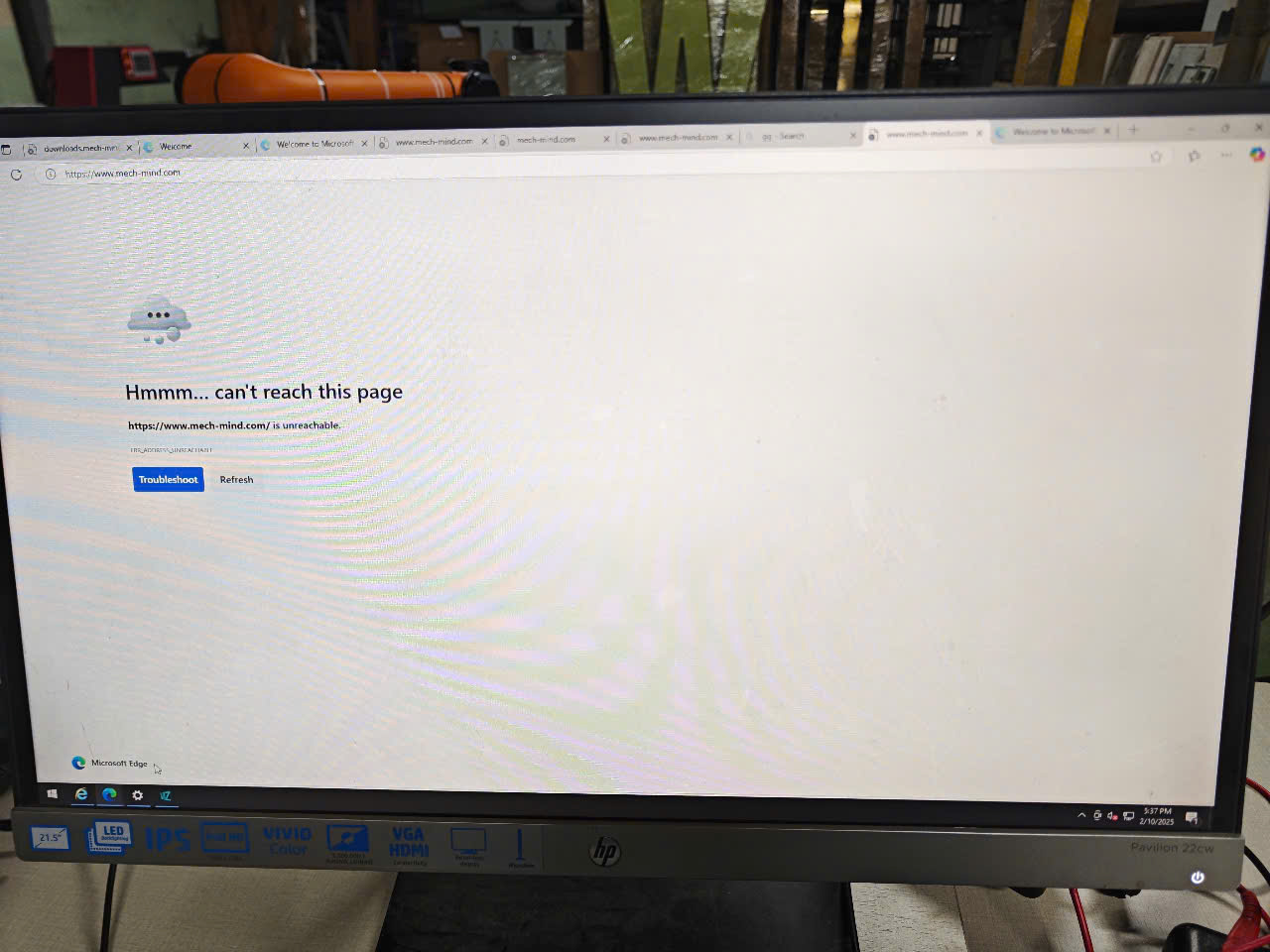

But my IPC doesn’t load like the image I sent you
Thank you HaoChen for assisting me. I will try it tonight. If you encounter problems, please help me
Hello HaoChen, I have solved the problem of downloading Mech DLK software. I am doing a simple problem of identifying NG and OK products on DLK software. There is another problem in clamping screws, is it necessary to use Mech vision? Or just connect Mech Viz to the robot to meet the requirements, no need for Mech vision?
Looking forward to your feedback, thank you!!!
If you do not need vision to recognize the screws (just let robot to move the fixed point), you can only use viz without vision.
[Or just connect Mech Viz to the robot to meet the requirements, no need for Mech vision?] ----- Yes !
1 Like
If I want to calibrate a robot or calibrate my hands and eyes, I must use Mech vision, right?
Is there any way to calibrate and calibrate the Robot without needing Mech vision?
Hope you give me feedback, thank you HaoChen!!!
- Yes
- No