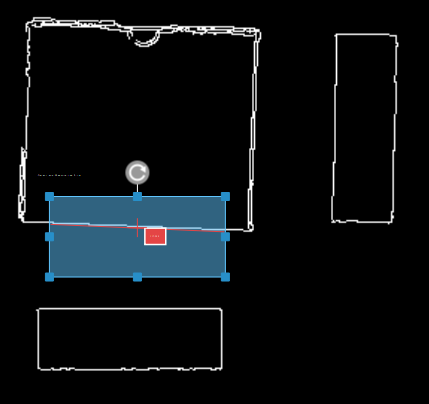
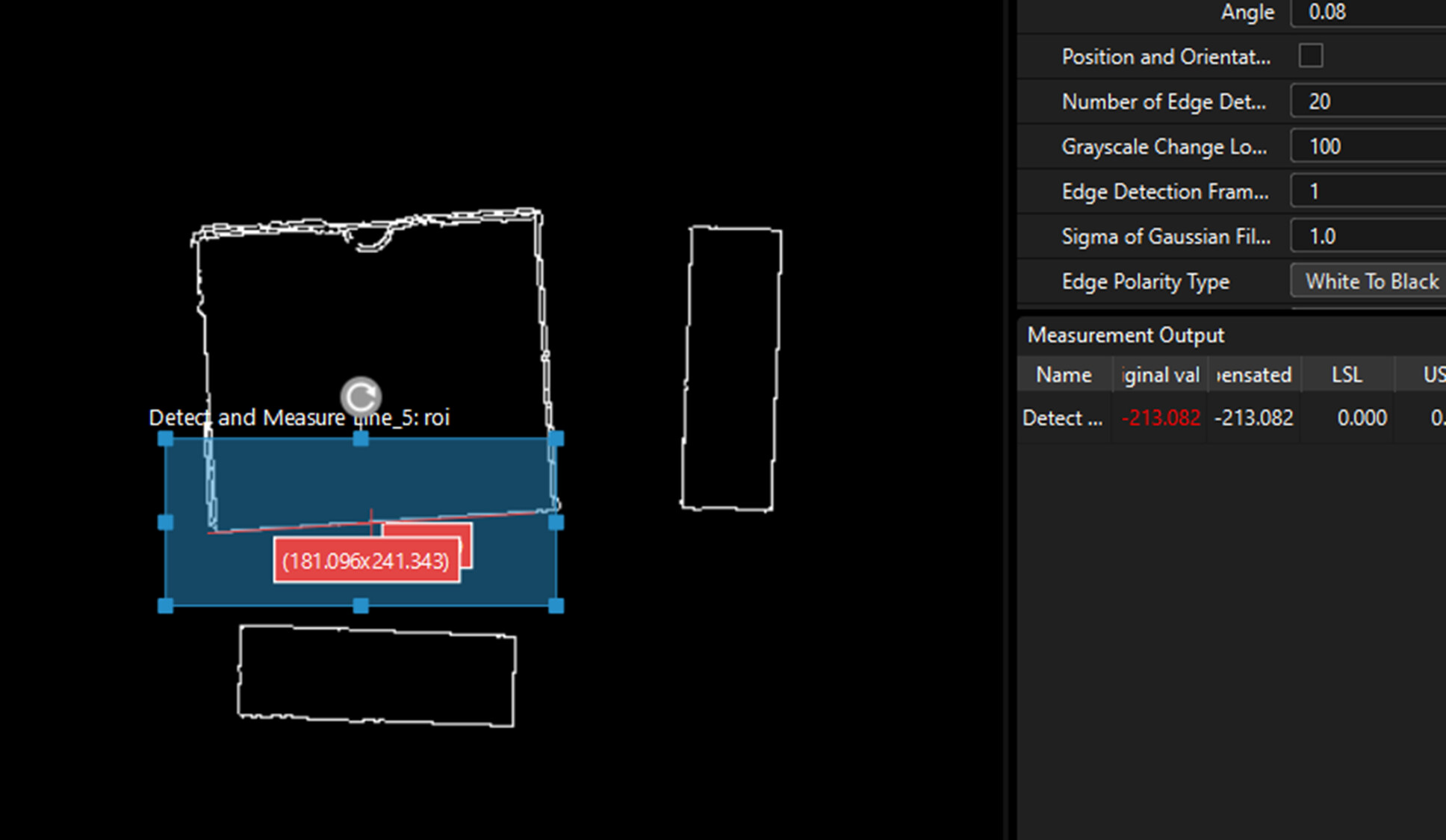
How do I get the 2D ROI to fixture itself to the Pose of the box in the image after using the “3D Workpiece Recognition” step? I would like to be able to rotate the box and have the ROI rotate and move as well.
Apologies for not fully understanding your intended meaning.
To better assist you in resolving the issue, please provide the original requirements along with a few sample raw images or your original vision-project.
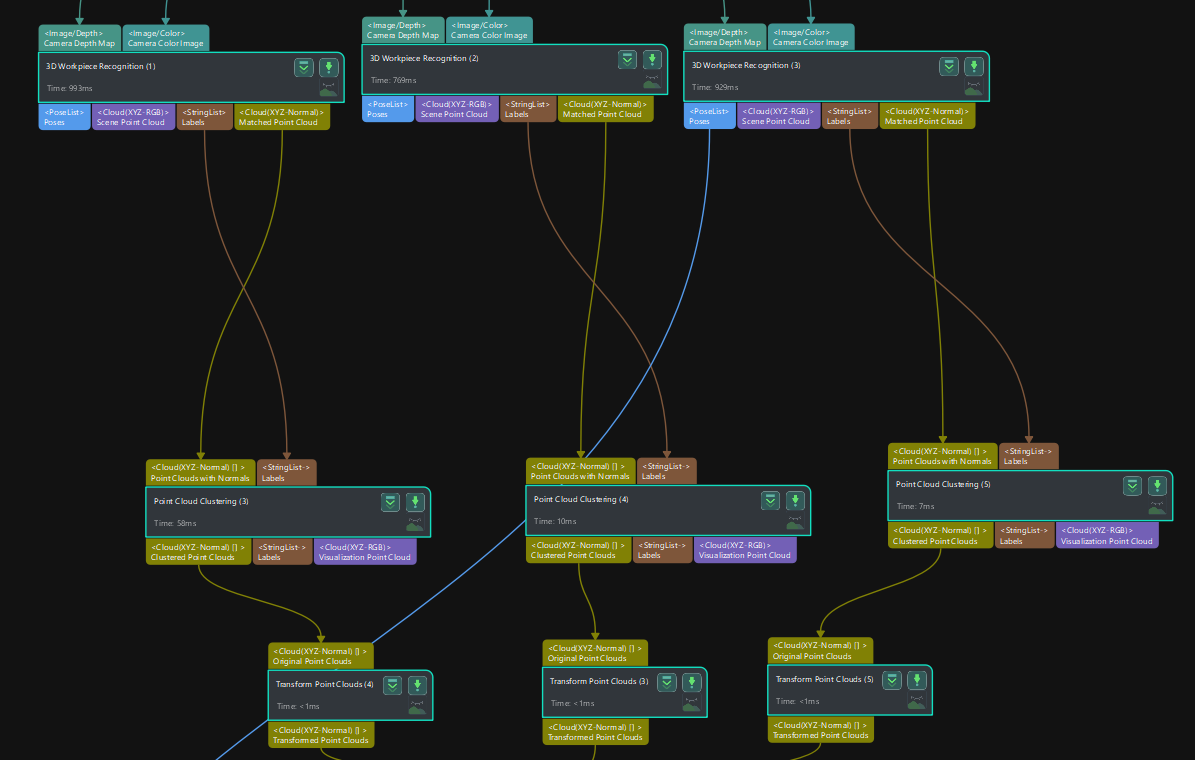
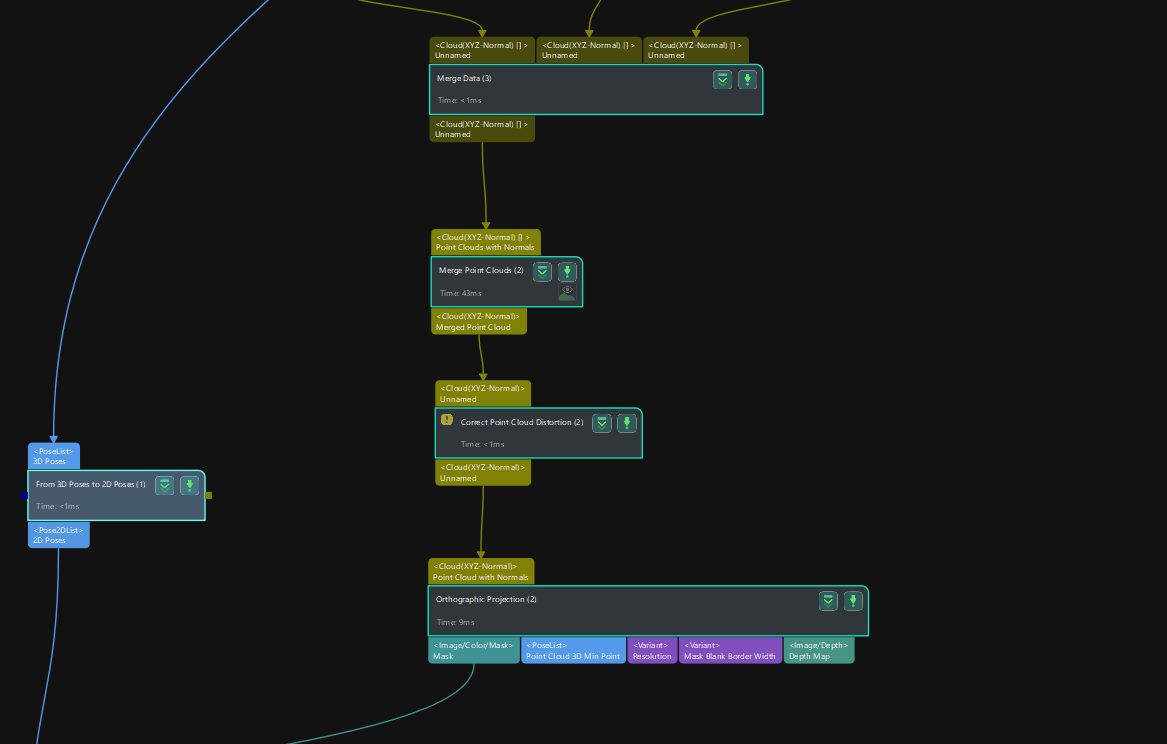
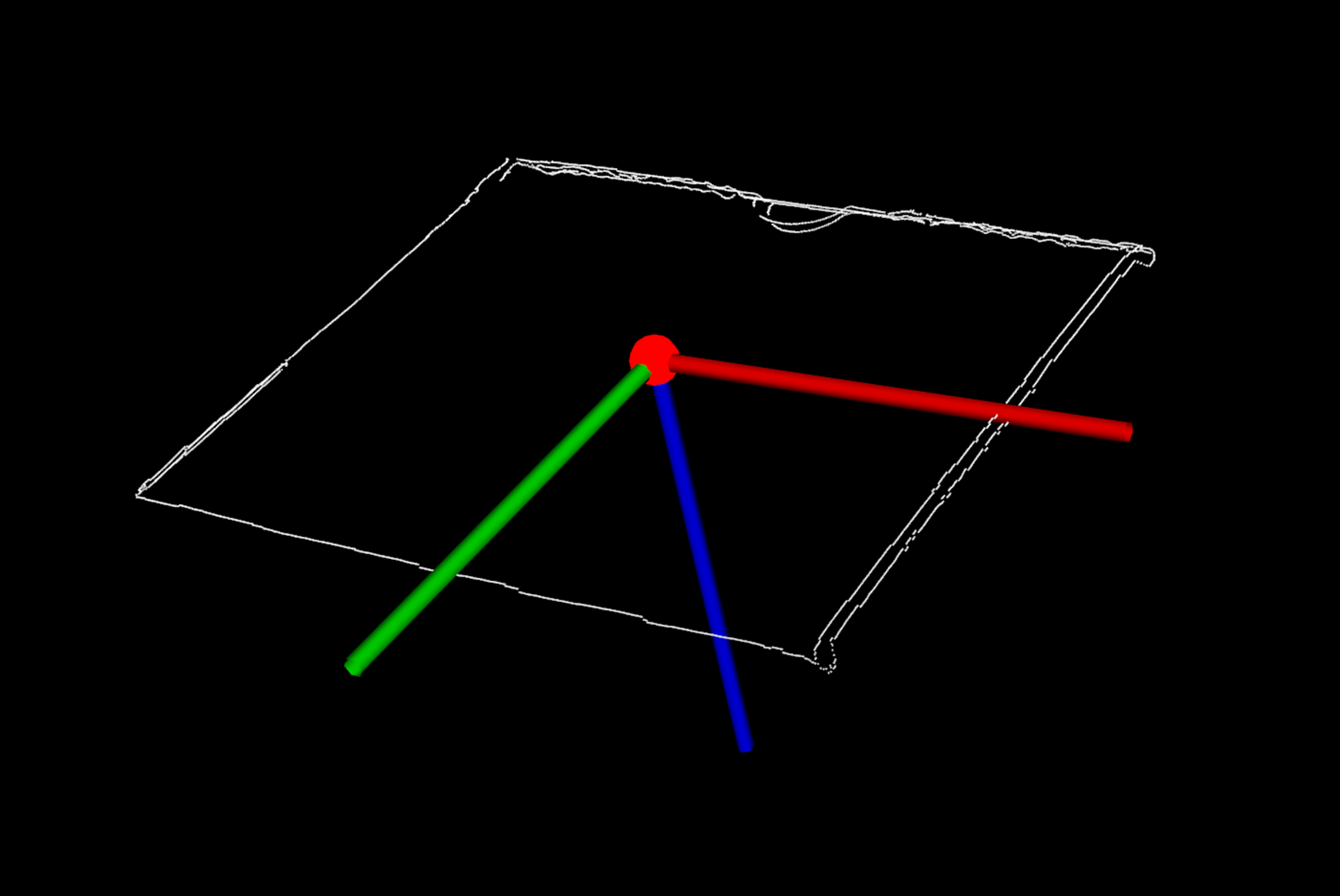
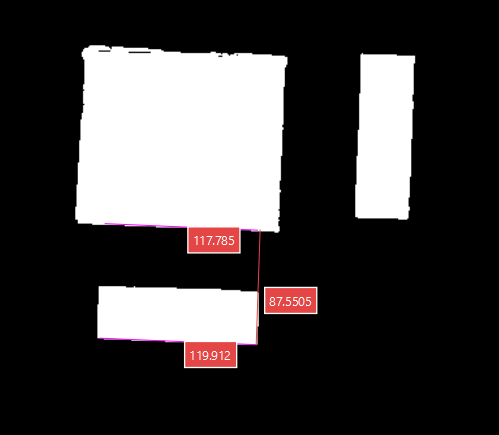
I suggest first transforming the point cloud to a common coordinate system (using the object’s center point as the origin), and then performing orthogonal projection. This way, the ROI remains consistent in the same coordinate system. Afterward, you can proceed with 2D measurements. Like the pic shows.
Overall:
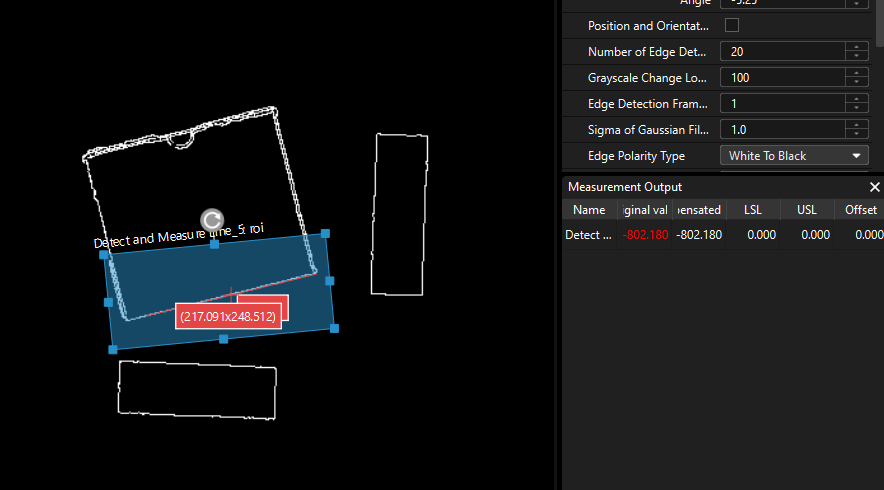
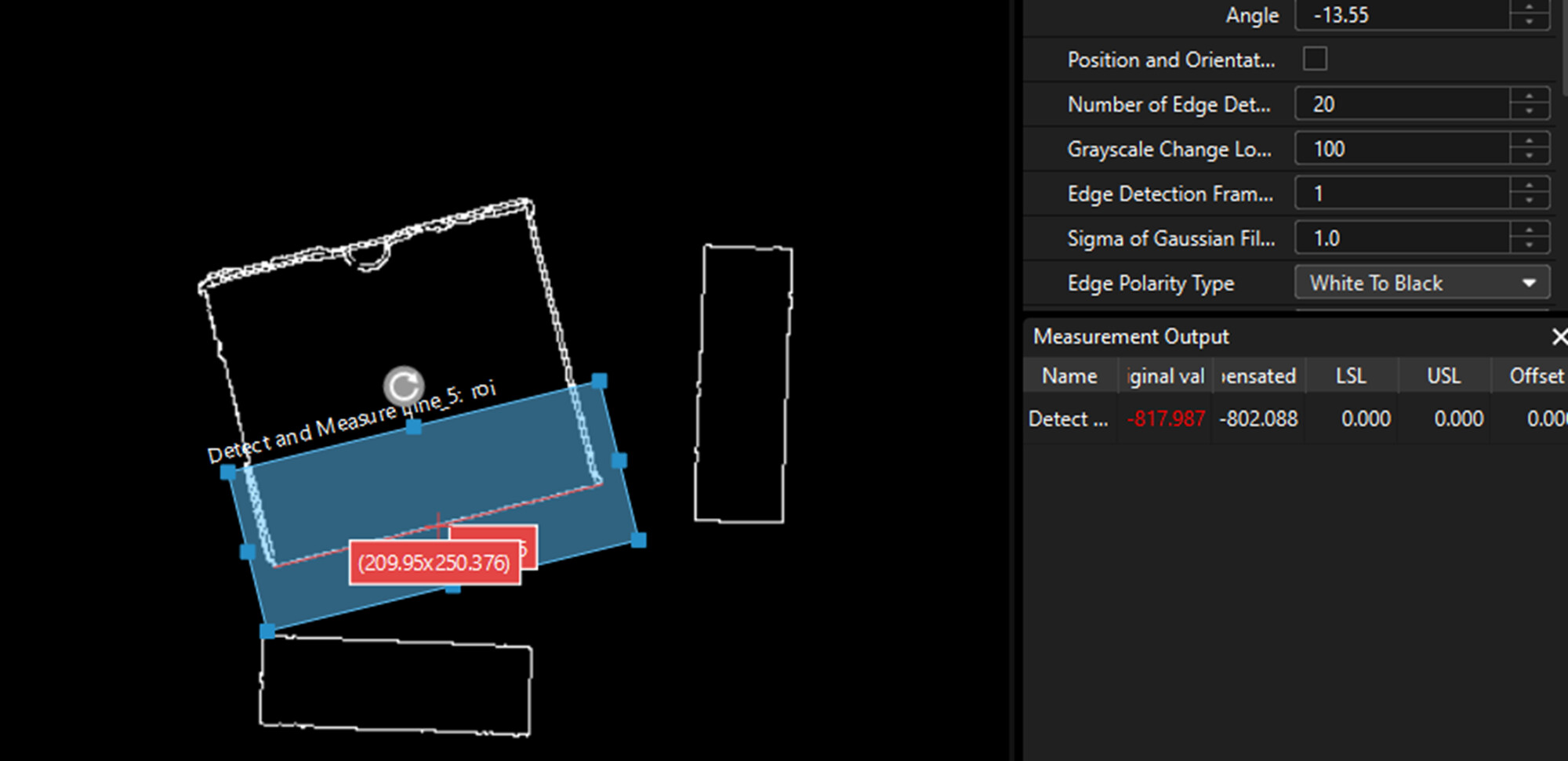
When the box rotates, this is simulating a stack of metal sheets that may change in orientation when placed into position by the operator, I would like to have the ROI rotate and move with respect to the Pose found previously. Also, I need to keep depth/height distortion kept to a minimum as consistent and accurate distance measurement is required for this program.
If more information is needed, please let me know.
OKay ~,
Please specify what you ultimately need to measure and describe any possible variations.
If feasible, kindly provide your current project along with a few sets of varying virtual data.