If you have a way to accurately detect the caps, you can use the [Point Poses to Reference Positions] step. We have used a DLK model for this before but other methods should also be possible.
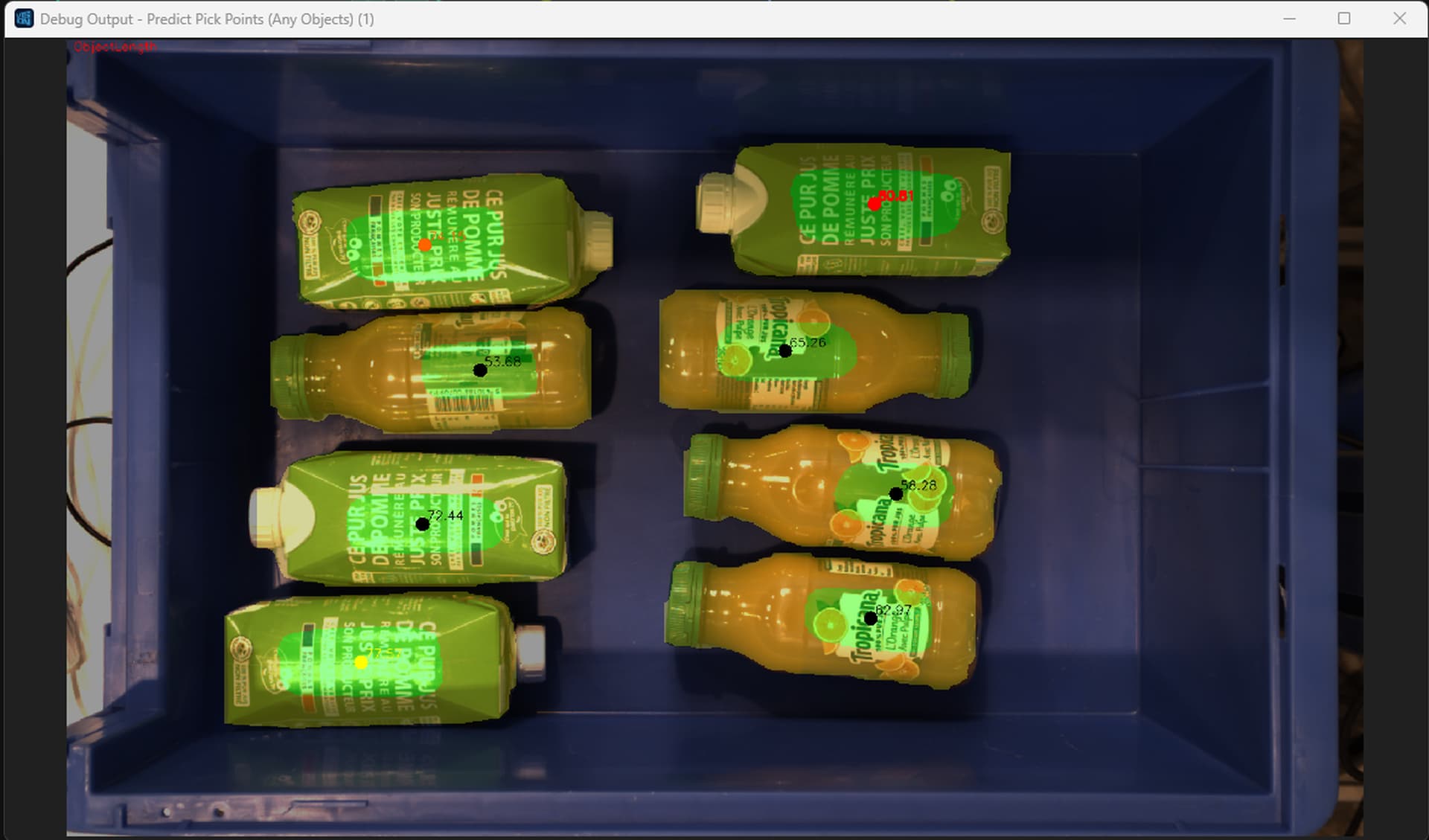
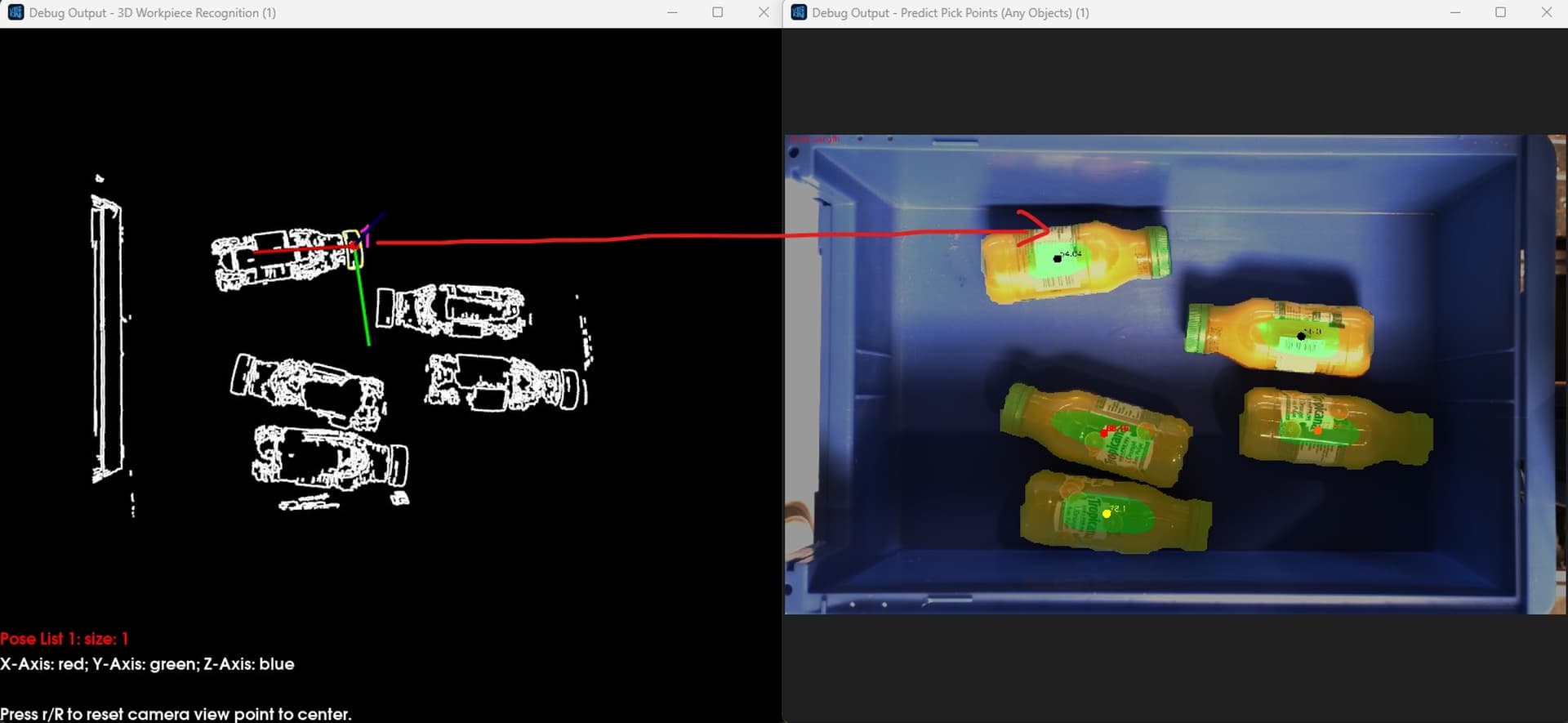
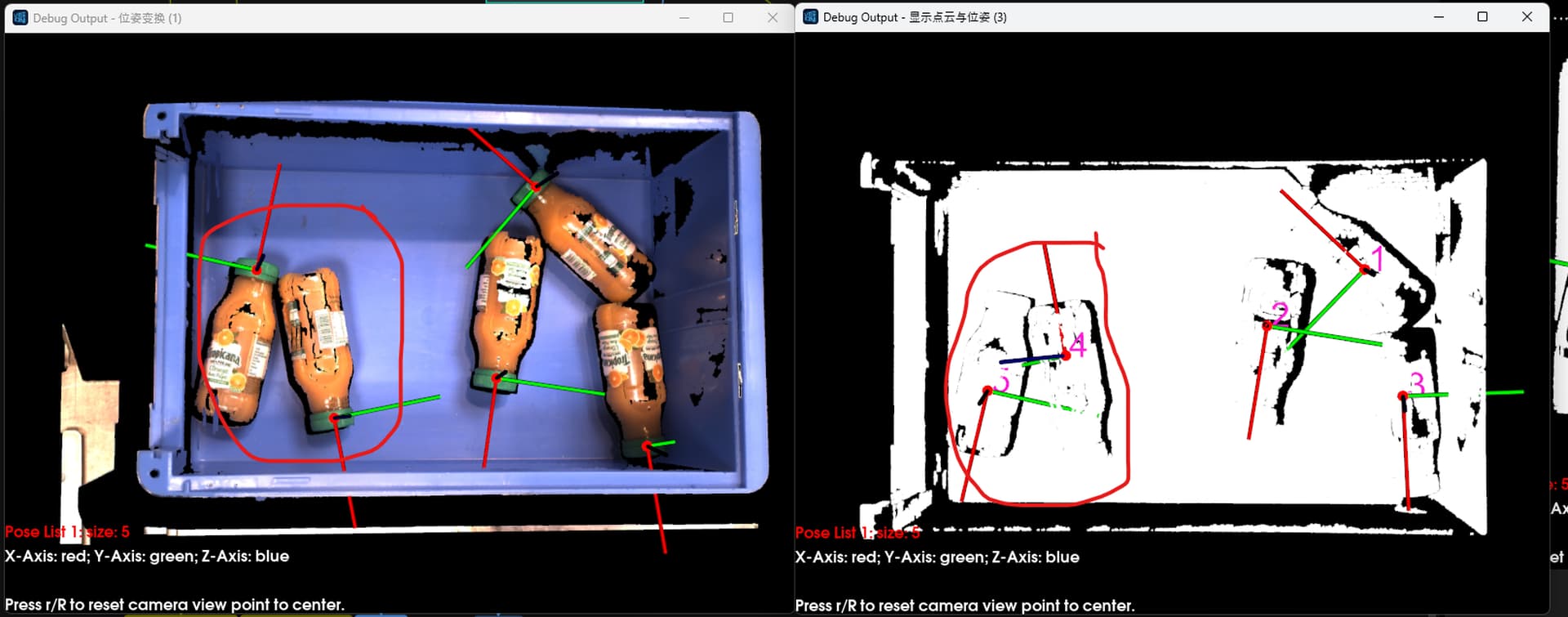
I would like to use the “Adjust Poses V2” function to point the pick point obtained by the “Predict Pick Points (Any Object)” function to the point of the “3d workpiece recognition” function.
But to do this I need to find which product corresponds to the cap I detected. Is there a method to search for the correspondence of a product thanks to the cap?
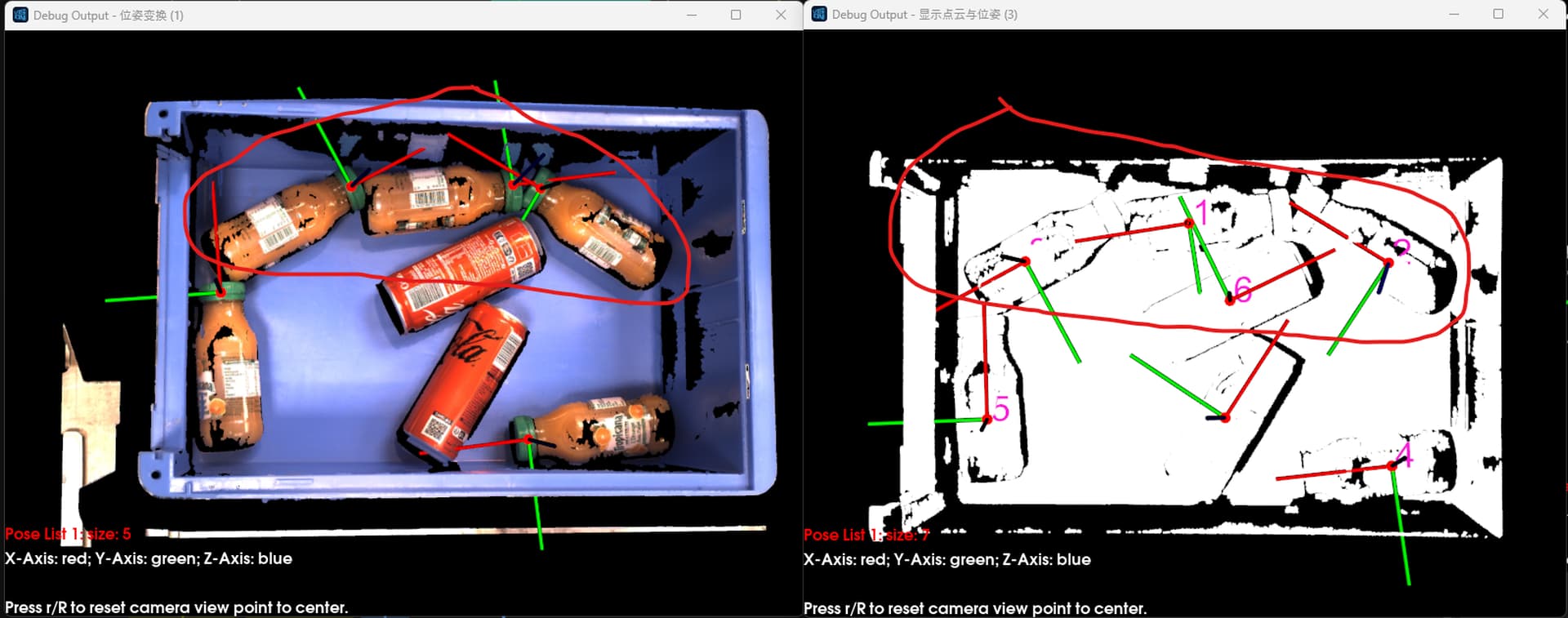
The approach you mentioned it is a feasible solution. Need to use a Python script to perform a one-to-one nearest sorting of the poses obtained from the two locations. However, in some cases, the retrieved neighboring poses may be incorrect because the closest pose could be from another object.
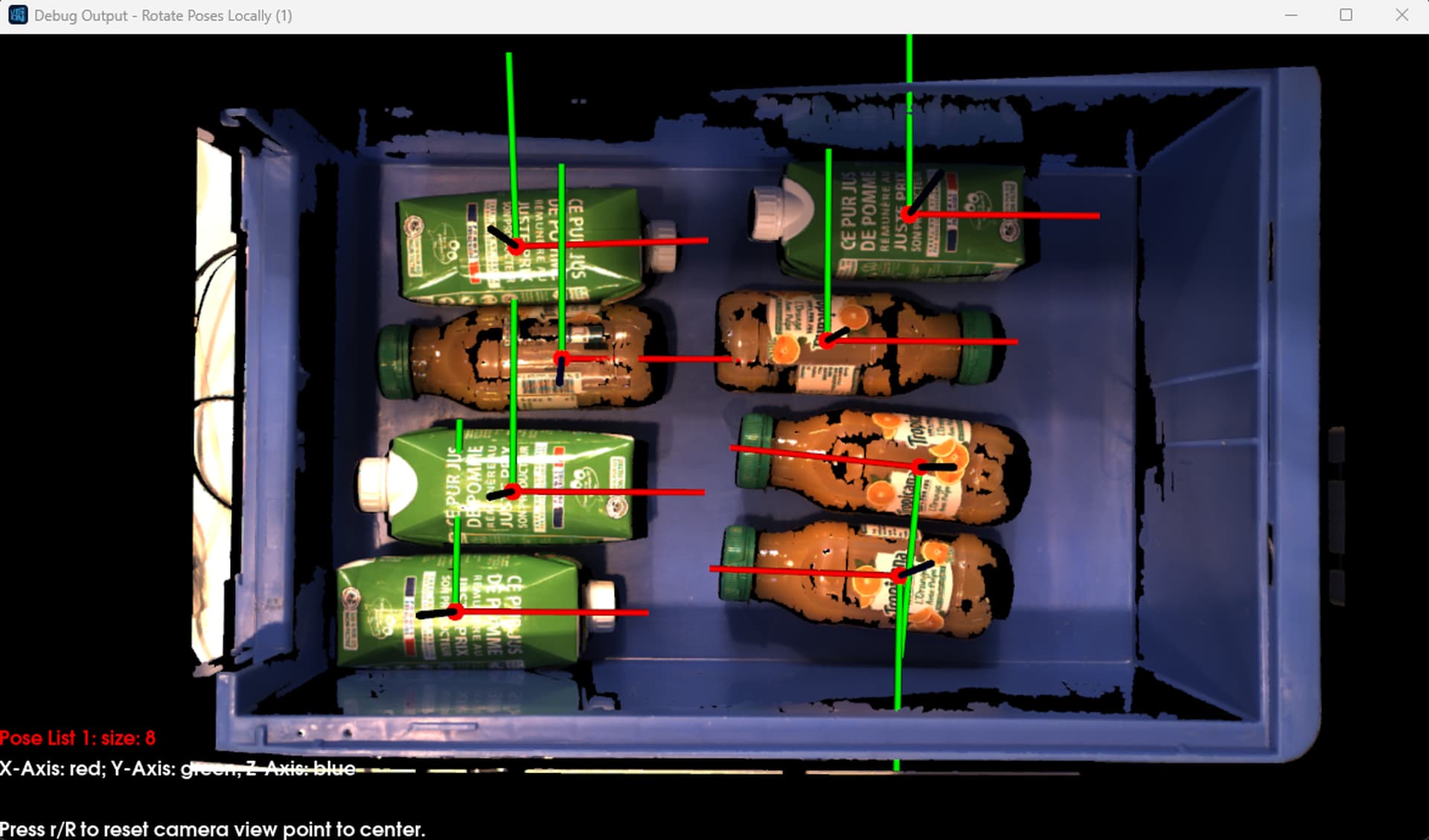
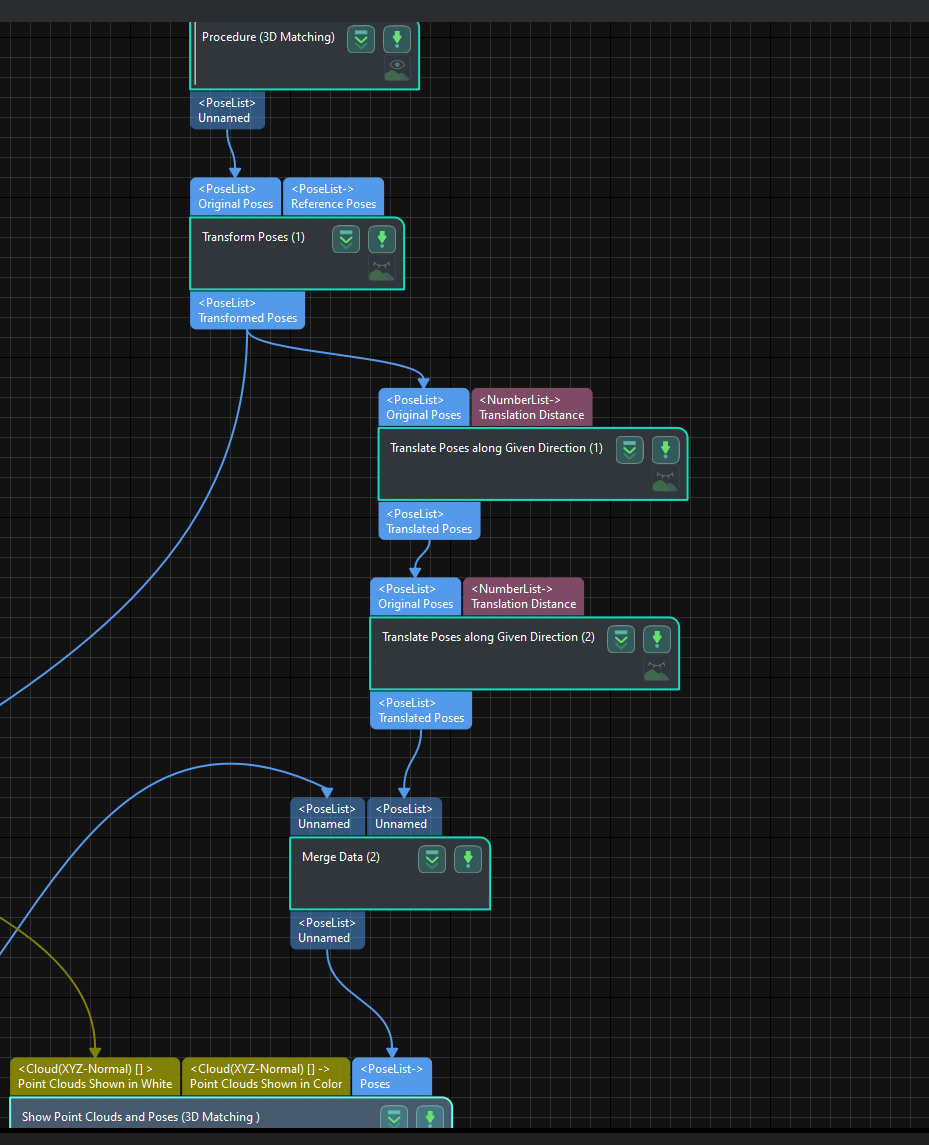
Another solution is to directly use 3D matching . And adjust the pose based on the object’s length.
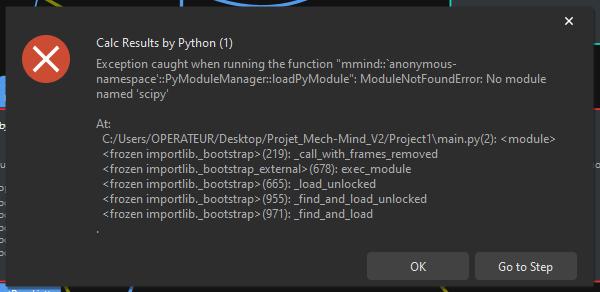
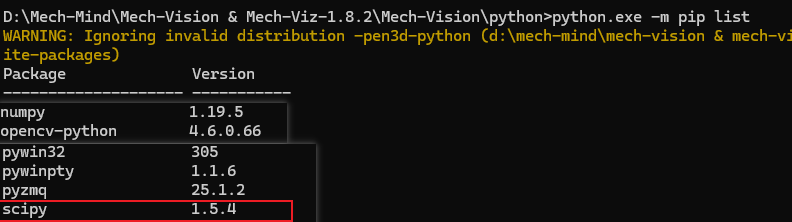
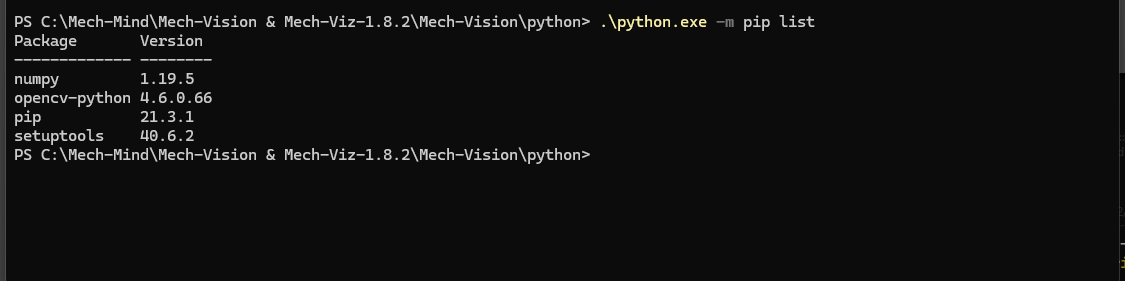
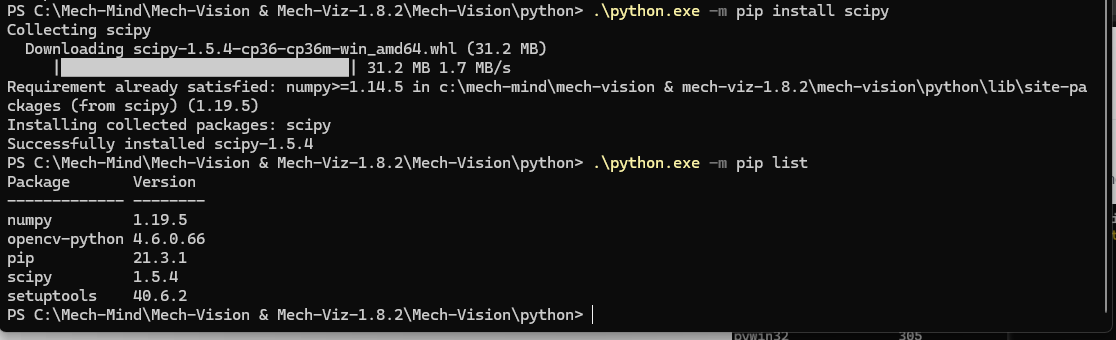
Switch to the “python” directory of the Mech-Vision software, such as C:\Mech-Mind\Mech-Vision & Mech-Viz-1.8.2\Mech-Vision\python.
Execute the command ” .\python -m pip install library_name “
Also check that in “Execution Flags” in the “Calc Result By Python” step “Reload File” is acticated or Mech-Vision will only reload the file when restarting the solution.
As I mentioned, finding the nearest one-to-one correspondence for objects and poses may not always be accurate in certain situations. It may require adding some threshold to avoid similar issues, but in more complex scenarios, even with added thresholds, errors may still occur. Therefore, I think using the 3D matching method is currently the more stable approach.