Hi,
is it possible to connect two clients to die IPC at the same time, and then get results from Viz for one client and results only from vision for the other?
Im currently connected with an Fanuc CRX through the CRX Plugin (TCP/IP, Standard Interface) with the IPC.
One Vision Project on the IPC locates the parts, one Viz project plans the robot movement. The planned moves are send to the robot.
Now i got the demand to integrate a small camera based qualitiy control afterwards in the automation, which runs independently from the cobot. So now there is the question, if its possible to run a second vision project (with an external 2D Camera) parallel to the other one and the path planning on the same ipc, and to send the results to the other client?
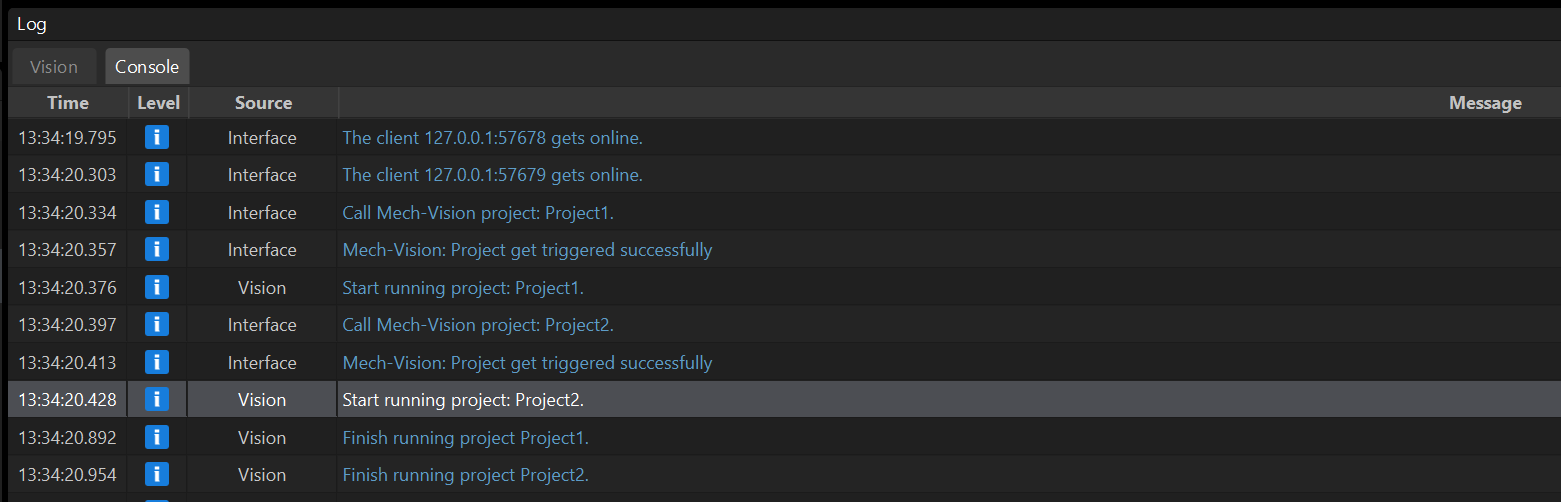
Im worried about what happens if both clients trigger at the same time.
In a similar fashion, you can also connect multiple robots to the same IPC, if some requirements are fulfilled:
Assuming the robots use an exclusive set of Vision projects (e.g. Robot1: 1,2,3, Robot2: 4,5), the robots are of the same brand and Using only Mech-Vision (without path planning):
All projects have cameras in ETH setup: No problem
At least one project has a EIH setup: Need to write a custom adapter (and dispatcher) with one RobotServer for each robot, e.g.:
Using Mech-Vision and Mech-Viz:
Same as for using Mech-Vision only but you need to select the robot model that is used in Mech-Viz for the settings in “Robot Commuication Integration”. Also note that only one robot can use Mech-Viz.
If you connect robots of different brands this will require a more complex custom adapter.