I am using MechMind software to control a robotic arm. The setup involves localizing a 3D object and moving the robot’s Tool Center Point (TCP) to follow the object’s coordinate system. However, I am encountering an issue with the robot’s movements relative to the localized object’s coordinate system.
Problem Description:
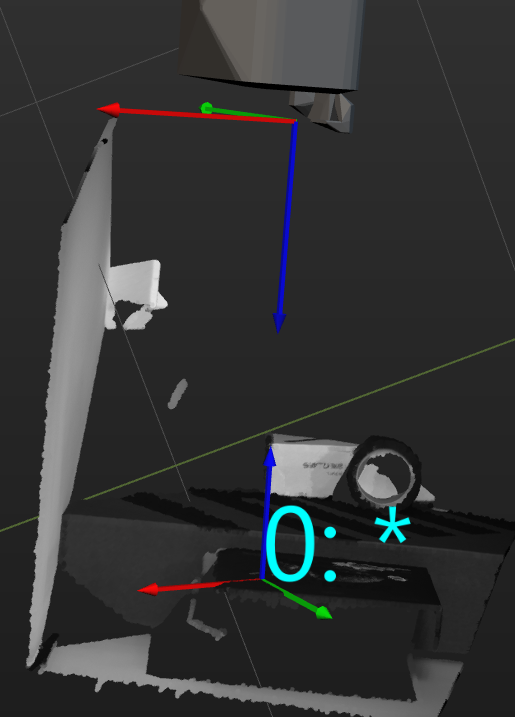
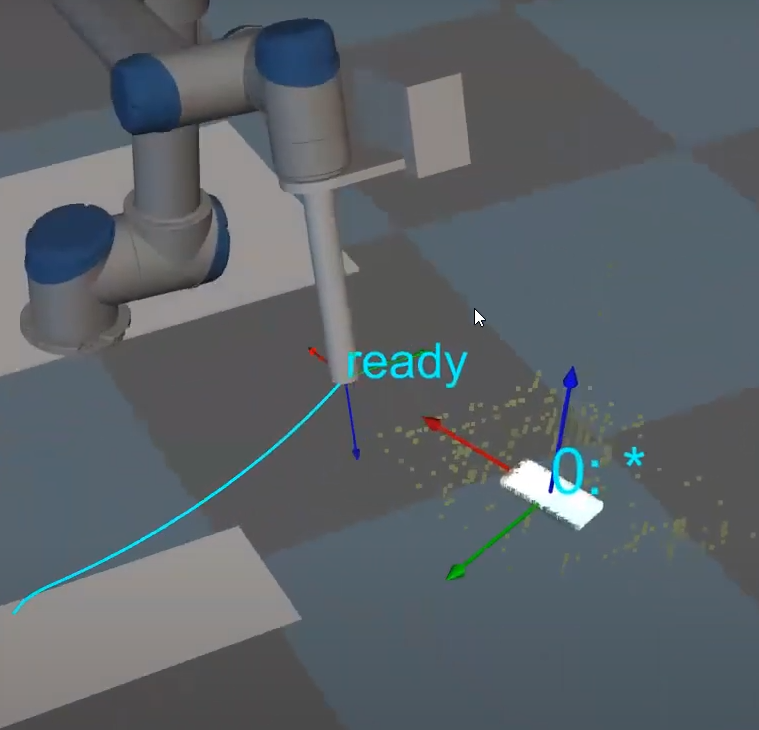
Despite having a correctly localized 3D object, labeled as 0, the robot’s TCP only follows the X direction correctly. However, it moves in the opposite directions for the Y and Z axes. This misalignment is causing the robot to not interact with the object as intended.
I have also checked the demonstration Youtube video from MechMind webinar and it seems to have the same scenario mentioned (snippet from 29:08 at https://www.youtube.com/watch?v=u9sDbSTTV6w&t=966s&ab_channel=ZTEC-Robot%26Vision).
Questions:
As to follow the convention, the robot should move its TCP following all 3 axes of the localized object so that we can expect in advance where the robot will move to even without the simulation. Are there specific settings in MechMind that could cause the Y and Z directions to be inverted? If so, how can these be corrected? Any detailed guidance, step-by-step instructions, or insights from those who have faced similar issues would be greatly appreciated. Thank you in advance for your assistance!
- Software version: Mech-Vision 1.8.2, Mech-Viz 1.8.2, Mech-Eye Viewer 2.3.3
- Camera model and firmware version: Mech-Eye Nano Ultra, Firmware 2.3.3 61990afa6
- Robot model: Doosan Robot M1013
