Hi all,
I am having erroneous collision detection trips and have 2 questions as below. Specifically I believe the trip is happening between the EOAT and Robot. The robot can make the move. I tried changing the collision model to nothing, but for some reason that drastically altered the pose I got. I need the EOATs as they have pose offsets for my tool’s TCPs.
- How do I shutoff collision detection, or at least bypass it in Mech-Viz entirely.
- I have all the options selected that I can find to turn off and it’s still faulting out on a simulated move that my robot has no problem conducting. It’s probably faulting due to something in my Mech-Viz code, but I just want to turn it off for now until I fix other issues not related to Mech-Mind.
- When I read a collision detect log, where is the collision happening?
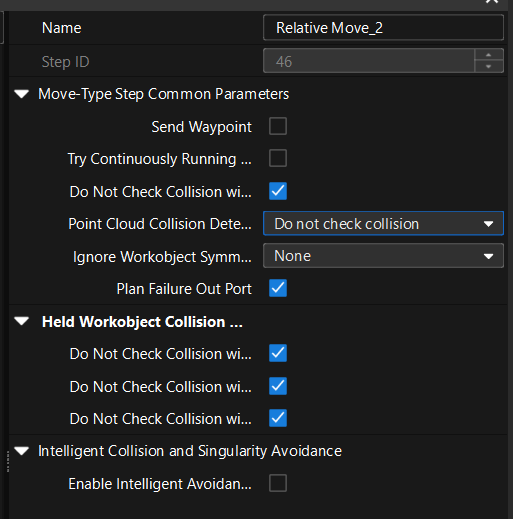
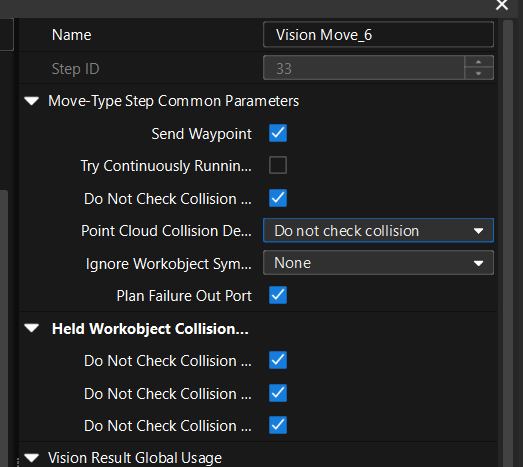
For example relative_move_2->Vision_Move_6. Does this mean the simulation got to relative_move_2 position, but there was an anticipated fault on the way to Vision_move_6? If this is the case then don’t I need to turn off collision detection on Vision_move_6 only?
(I currently have been shutting it off on all moves in my attempt to find what is causing it)