Hi there,
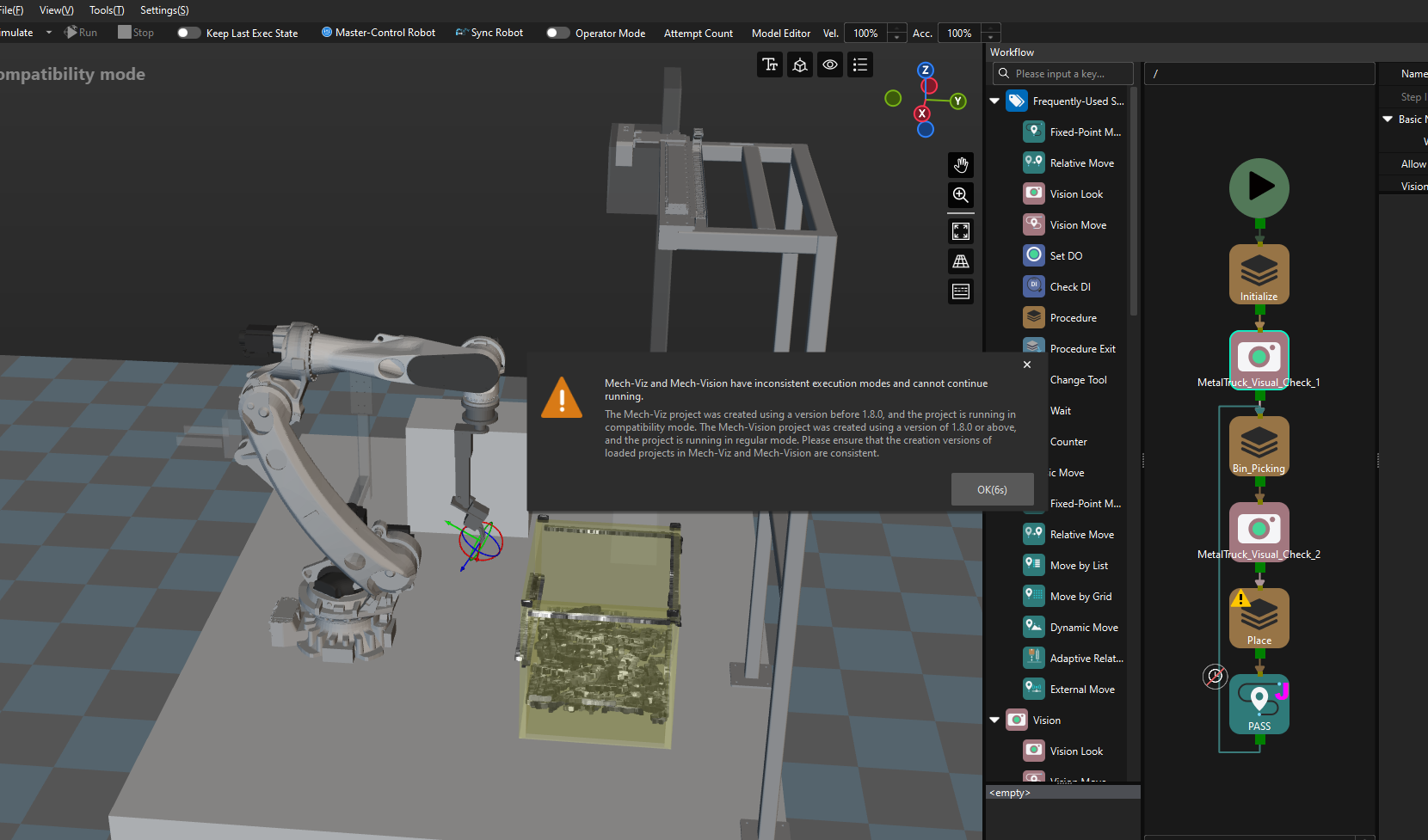
I just opened my previous Mech-Vision project and am now running it with Mech-Viz. However, it seems there is a prompt that I cannot continue running the project.
How can I solve this?
Mech-Vision and Mech-Viz are already in Compatibility Mode.
Hi there,
Here are some solutions that may help:
-
Please check the upgrade notes: 1.8.0 Upgrade Notes
-
You may need to package the Mech-Vision project as a solution and then run it in compatibility mode.
-
When opening projects/solutions created with versions before 1.8.0, the software will automaticallyswitch to compatibility mode. In this mode, please pay attention to the following:
-
Ensure th at all relevant software (M ech- Vision, Mech-Viz) is also in compatibility mode. Otherwisethe software cannot function properly in coordination and may result in errors.
-
When manually entering robot poses (such as during manual calibration or teaching pickingpoints), if the pose displayed on the teach pendant differs from the one displayed in the simulationinterface (e.g., with different Z-coordinate values), you should make the corres ponding adjustmentsbefore entering the data in the software.
An example ofinconsistent coordinates:Pose displayed on the teach pendant: X=123 mm,Y=456mm,Z=789 mm Pose displayed in the simulation interface: X=123 mm, Y=456 mm, Z=1189 mm
-
For specific adjustment methods and inform ation for particular robot brands, please refer to theuser manual (Help->User Manual → Search for “compatibility mode”).
1 Like