Hello
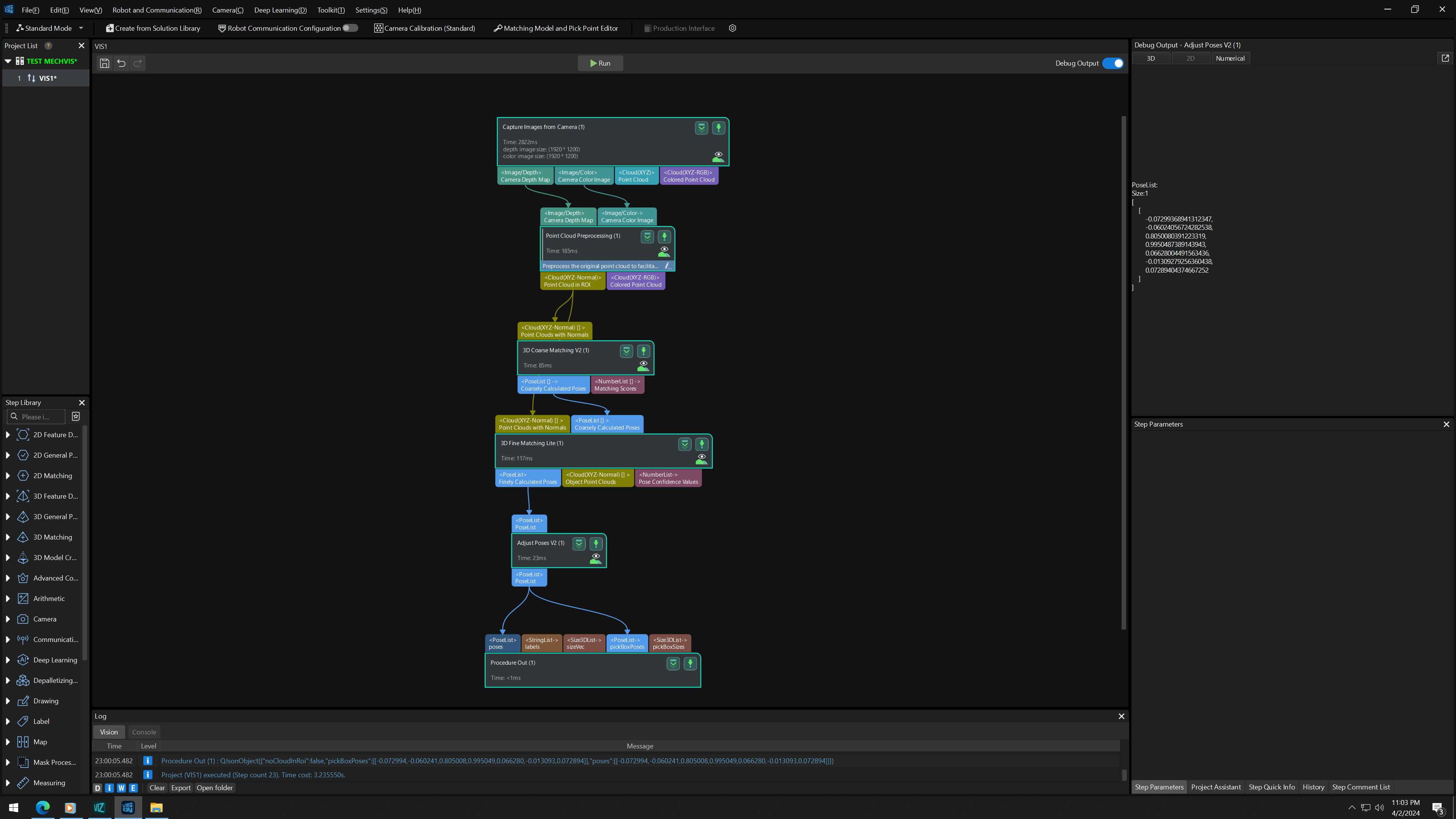
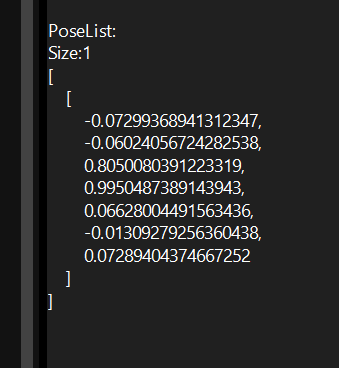
We are new to to mech mind vision system. We are doing simple bench setup with PRO M camera and the IPC. When we do simple vision project like this1, its output some matrix2 but we are confusing what data type is this. Should we do some transformation to get the space coordinate from this matrix?
thank you in advance!
*1
*2
Hi, your current output is the object pose represented by the quaternions, if you want to change the data type of the pose from quaternions to Euler angles, you can use the Convert Quaternions to Euler Angles in Poses Step in Mech-Vision. Please refer to the Convert Quaternions to Euler Angles in Poses docs for more information.
Thank you for the reply.
We have try the ‘convert quarternion to euler angle’. this is the result :

But how about the units? is the translation part of this matrix is in ‘meter’ unit?
Hello,
Which unit it is depends on the output from the preceeding Steps. This Step simply does a numerical conversion.
Usually, by visualizing the pose calculation result, you do not have to check the unit.
Hello, the final output of Mech-Vision is the workpiece pose, and the expression of the pose uses a common data format (quaternion);
But you don’t have to worry about this, as long as you set the ‘Robot communication configuration’, and when the robot system seeks the workpiece pose, as long as you select the corresponding data type, the results you receive will be automatically converted into tool coordinate system.
Please refer to the manual for more details:
TCP/IP Interface Commands
1 Like
Hello. Thank you for the response.
So, we are doing research for our upcoming project where we need to achieve some accuracy level for the vision system. We want to know the accuracy value we get with current setup. Though we cannot communicate with the actual robot yet due to some reason. Can we see the result in space coordinate through mech-vision?
I noticed that you’ve already used the “adjust pose V2” step in your vision project, which will transforme your results from the camera coordinate system to the robot coordinate system.(online docs:Pose Adjustment Tool )(If you set the camera calibration parameters correctly. online docs: Capture Images from Camera).
FYI:
The accuracy of a vision system depends on many factors, including the accuracy of the camera, the accuracy of the robot, and the accuracy of calibrating the extrinsic parameters. If there are any issues in any part of the process, it can affect the overall accuracy of the vision system. Therefore, if you want to see the final accuracy of a vision system, when evaluating the accuracy of the system, it’s necessary to consider all these factors comprehensively, rather than just the performance of a single component.
Which command did you utilized to view the result ? As the command “convert quarternion to euler angle” doesn’t have an eye symbol to view the vector list.