Hi All,
How would I run collision-detection on multiple poses? Currently when I send over a list of poses from Mech-Vision to Mech-Viz it only evaluates the first pose (pose 0). I’d like to have it evaluate all of the poses I send and then either send all poses to my robot with a label for an identifier or only send poses that are collision free.
I tried looping the VisionMove block’s plan failure exit to an earlier block but I get errors saying there are no poses to evaluate.


Mech-Vision / Mech-Viz 1.8.0
Denso Robot VLA-4025
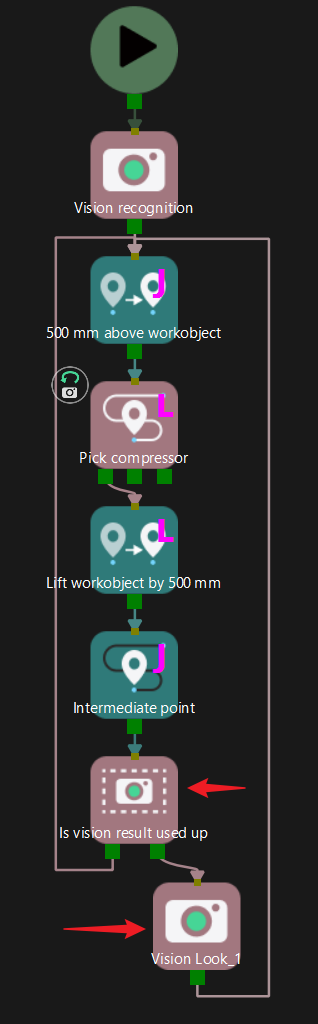
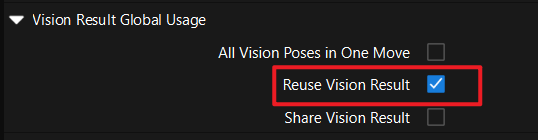
Hi Peter, you can check the “Reuse Vision Result” and then loop the VisionMove block, then you can evaluate Collision-Detection on multiple poses.
And, you can use “Is Vision Result Used up” together with the “Vision Move” to determine whether it needs a new capture. The example workflow is as follows:
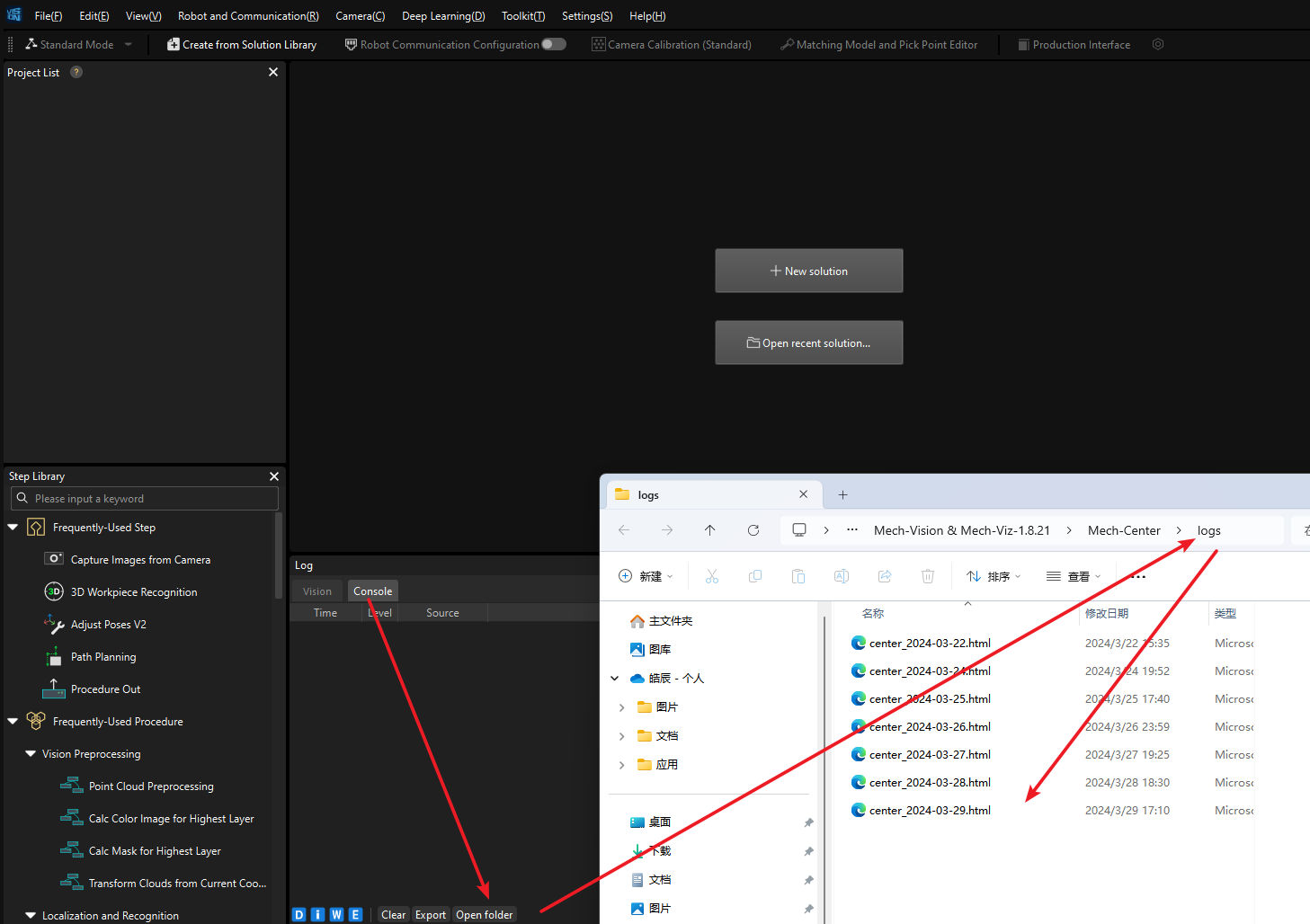
Besides, you can find the application example of the feature “Reuse Vision Result” in the “Example projects → Simple handling”, if you are using version above 1.8.0.
Thank you,
That worked! Do you know if there is any way to have Mech-Viz send more than 1 pose to the robot? It looks like it is only sending 1 and the only way to get more than 1 is through the Mech-Vision calls. Is that correct?
Mech-X 1.8.0
Denso VLA-4025
Hi Peter, which communication did you use? master-control or standard interface?
How did you find that Mech-Viz only sent one pose? I need some information to check where is wrong.
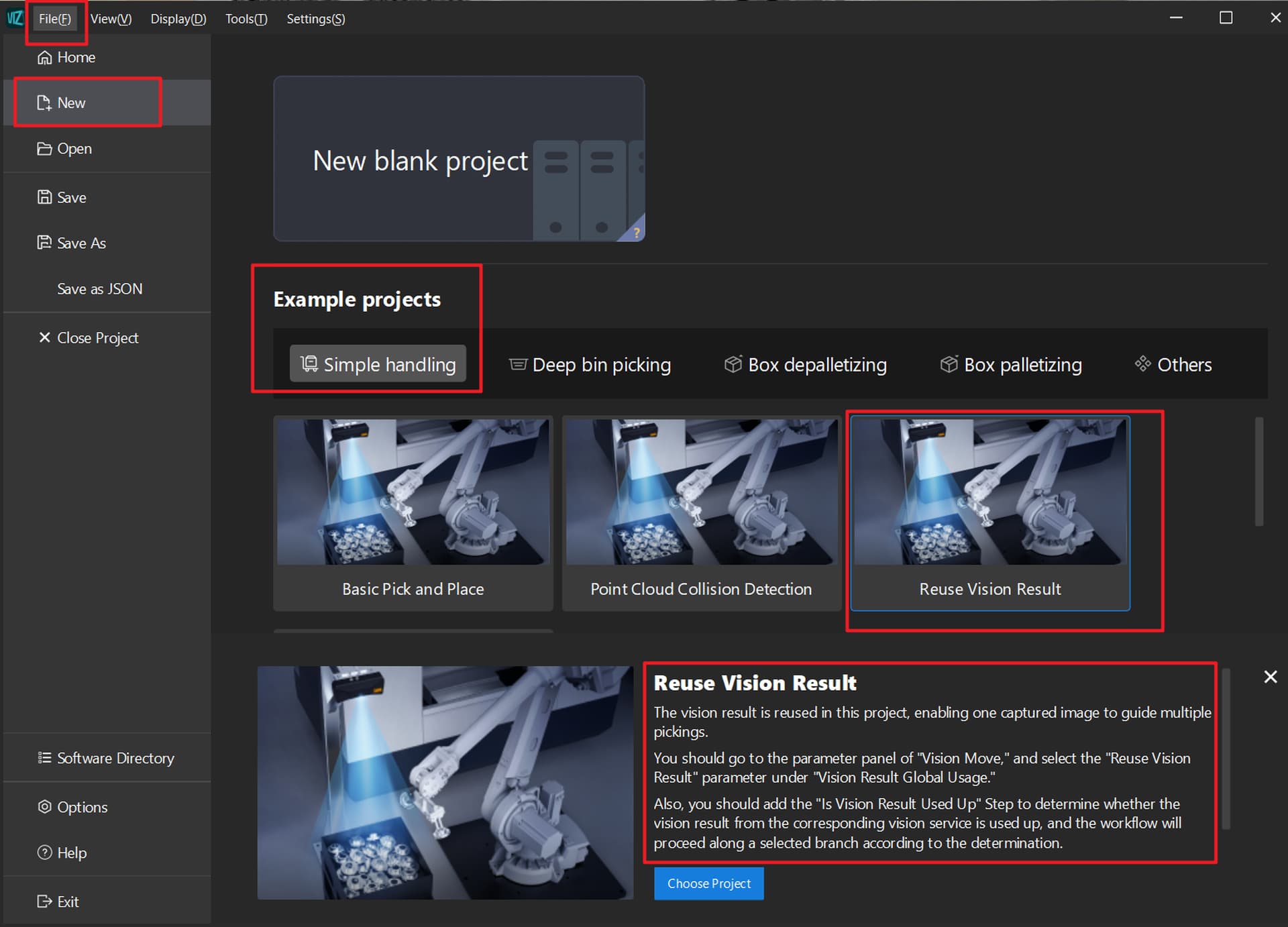
Please send me Mech-Viz log and Console log from Mech-Vision,and tell me the time when the error occurred.
Normally, Mech-Viz plans all of poses, when you use “Reuse Vision Result” and then loop the VisionMove block.
Thanks HaoChen,
It looks like Mech-Viz was sending all the poses I was only reading in 1 on the robot script. Fixed the issue and it’s working as expected.
Best Regards,
Peter Gent