The “Smart Path Planning in Bin” Step is planned to be officially launched in Mech-Viz 1.9.0.
Introduction
Background
During the implementation of the random picking projects, the following challenges often arise:
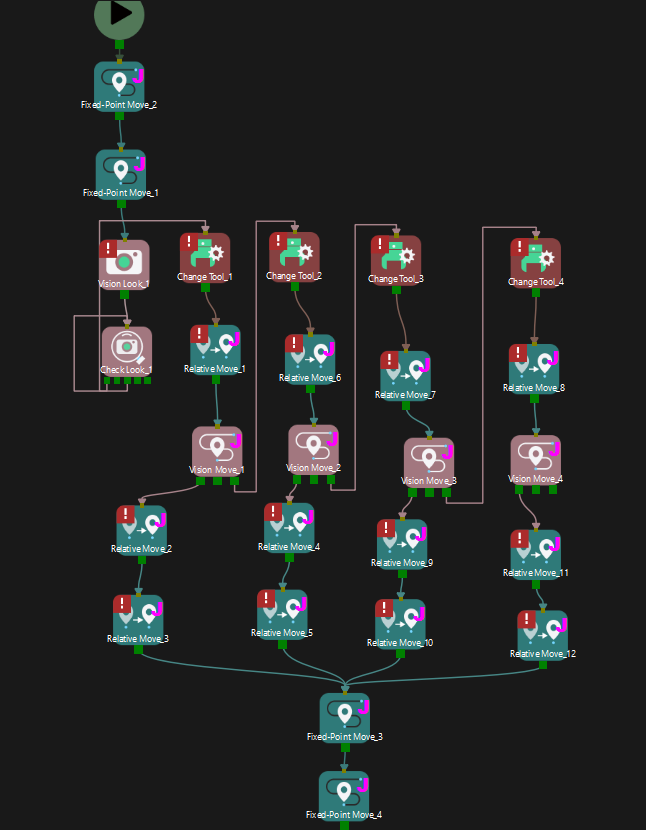
- High technical barrier: The projects often require setting reasonable relative move strategies based on the debugging experience of engineers, which may result in multiple rework iterations and long debugging times.
- Incompatibility of functions: There are limitations when using fixed paths to pick workpieces in different poses, requiring manual establishment of robot paths to adapt to various situations in order to improve planning success rates.
Technical advantages
-
Higher planning success rate: By enabling the robot to automatically attempt multiple paths for entering and exiting the bin based on algorithms, this Step resolves the limitations of a single path when picking workpieces in different poses, thereby increasing the bin clearance rate.
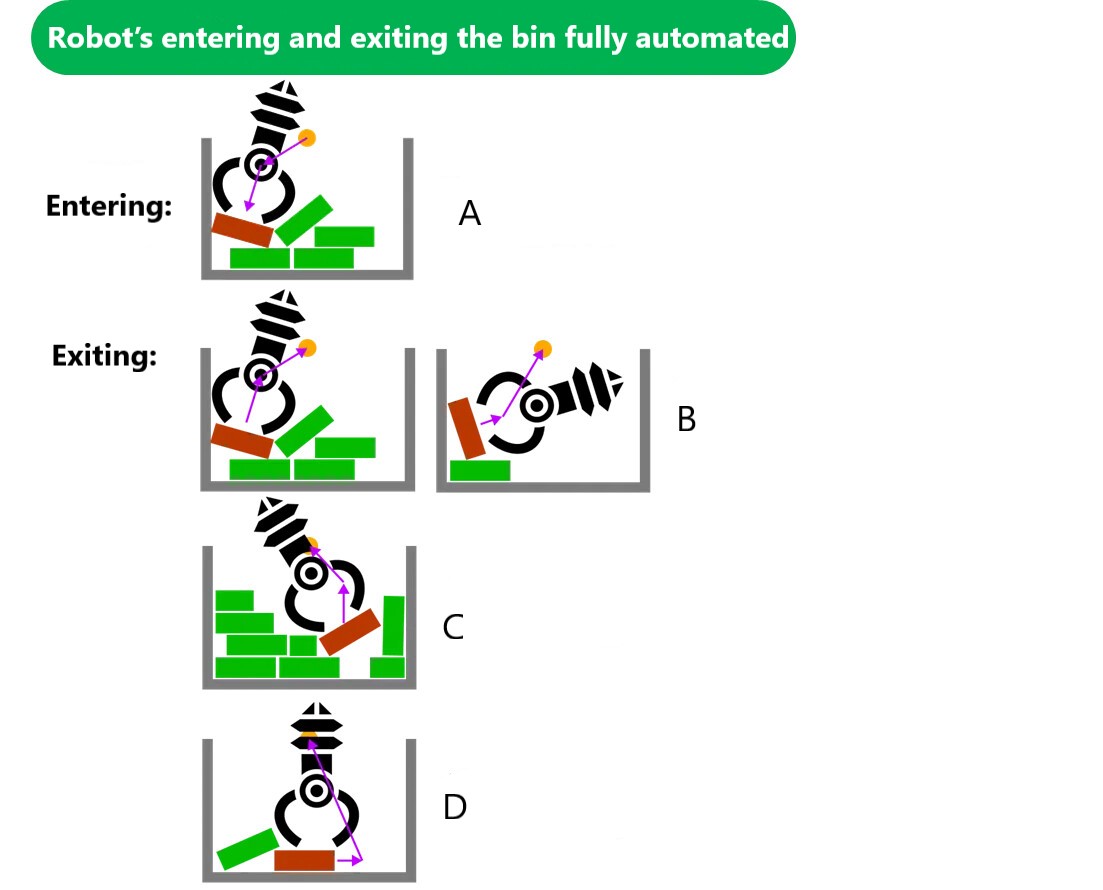
As shown in the figure above, the robot’s behaviors for entering and exiting the bin are fully automated:- One method for entering the bin:
A: Reaching a certain distance above the workpiece along the Z-axis of the workpiece reference frame. - Three methods for exiting the bin:
B: Lifting a certain distance along the Z-axis of the workpiece reference frame;
C: Lifting a certain distance along the Z-axis of the world reference frame;
D: Translating a certain distance along the X/Y-axis of the world reference frame.
- One method for entering the bin:
-
Simplified project setup: By utilizing the “Smart Path Planning in Bin” Step, the complexity of project configuration is significantly reduced, and users are allowed to build Mech-Viz projects more quickly and intuitively.
Applicable scenarios
It is recommended to prioritize the use of this Step in scenarios where neatly arranged/randomly arranged workpieces are picked within a single bin.
Randomly arranged rings in the deep bin
Randomly arranged inner gears in the deep bin
Other similar senarios
Technical details
Usage of “Smart path planning in bin”
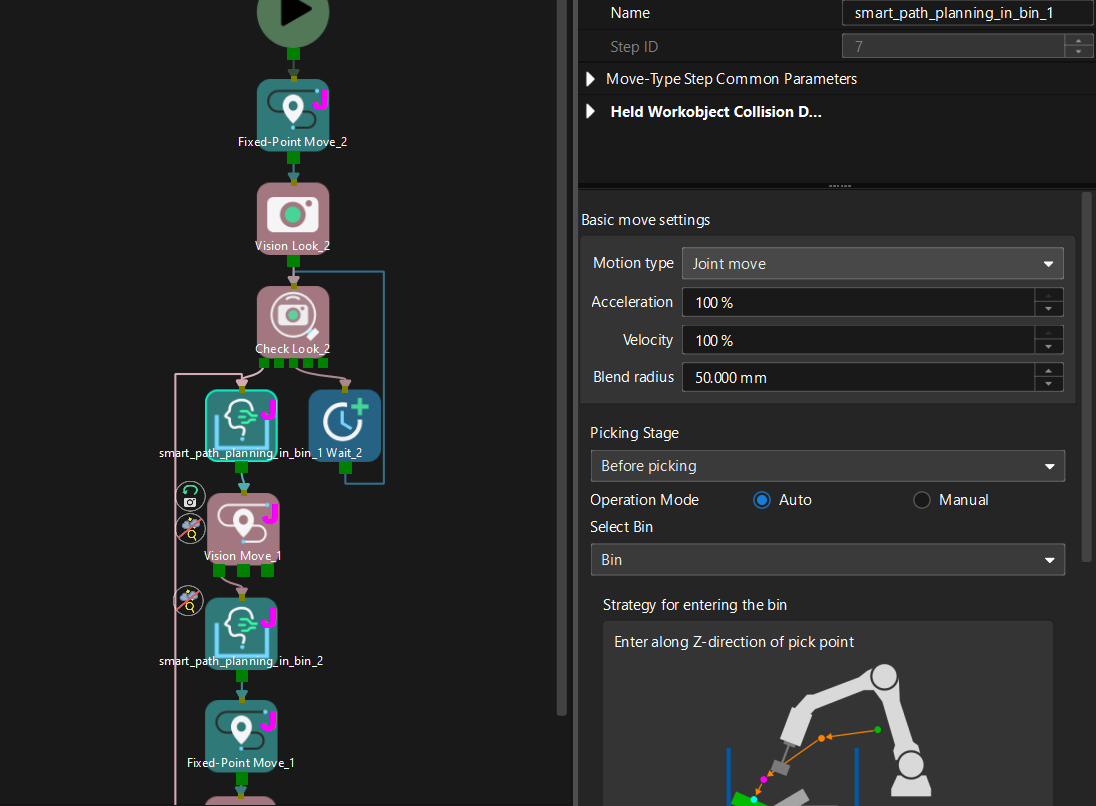
The “Auto” operation mode of this Step can adapt to the vast majority of scenarios, requiring only simple settings of the “Picking Stage” and the “Select Bin”, without the need to set any waypoints.
-
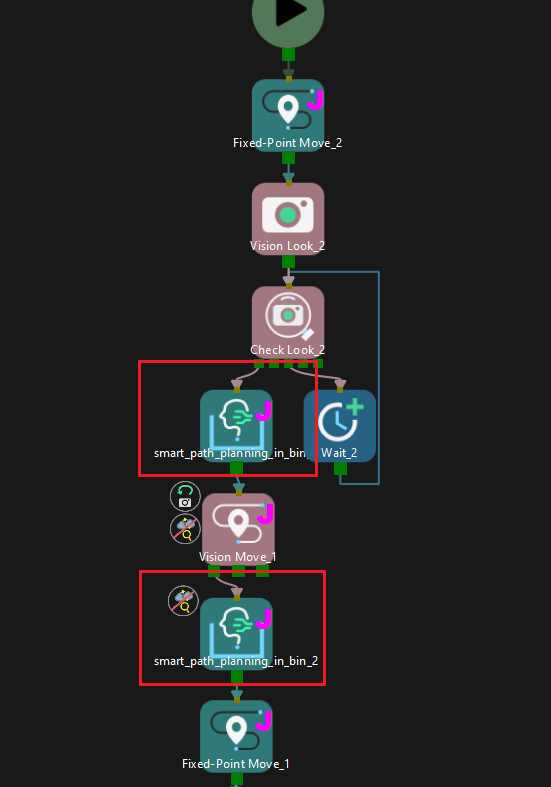
The “Smart Path Planning in Bin” Step must be directly adjacent to the “Vision Move” Step, with no more than one “Smart Path Planning in Bin” Step used both before and after the ‘Vision Move’ Step;
-
The “Picking Stage” parameter must be selected with the proper value. If the “Smart Path Planning in Bin” is used before the “Vision Move”, select “Before picking” for the “Picking Stage”; if it is used after the “Vision Move”, select “After picking” for the “Picking Stage”;
-
The bin must be selected correctly. The “Smart Path Planning in Bin” Step will automatically calculate the paths of entering and exiting the bin based on the pose and size of the bin. Therefore, selecting the wrong bin may result in planning failure;
-
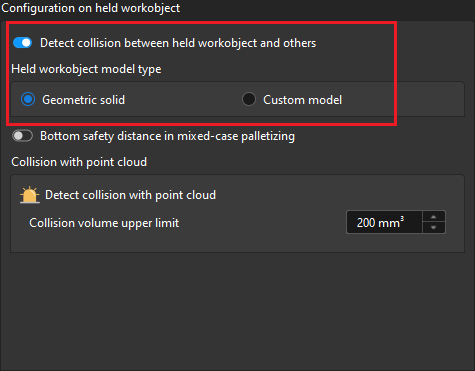
The “Detect collision between held workobject and others” must be enabled, and this requires Mech-Vision to provide either workpiece size or workpiece model. This is to avoid collisions between the workpiece and the scene model when executing the automatically calculated paths. Additionally, the height of the workpiece is also one of the bases for calculating automatic path.
-
When the “Picking Stage” parameter is set to “After picking”, there must be a fixed waypoint after this Step. This fixed waypoint will be used as a basis for calculating the path.
-
Each “Smart Path Planning in Bin” Step corresponds to two waypoints. When writing robot communication programs, make sure to receive these two waypoints.
Planning success rate comparison
The success rate of planning with the “Smart Path Planning in Bin” Step is higher than that of the “Relative Move” Step. For the same set of pose data, the “Smart Path Planning in Bin” Step can successfully plan 15 times, while the “Relative Move” Step can only successfully plan 10 times.
Technical principles
-
Only the “Auto” operation mode of this Step is validated in actual projects, therefore, this section only introduces the principles of the “Auto” mode.
-
No matter whether the “Picking Stage” is set to “Before picking” or “After picking”, the number of waypoints remains 2. Therefore, this Step is suitable for scenarios with standard interface communication.
-
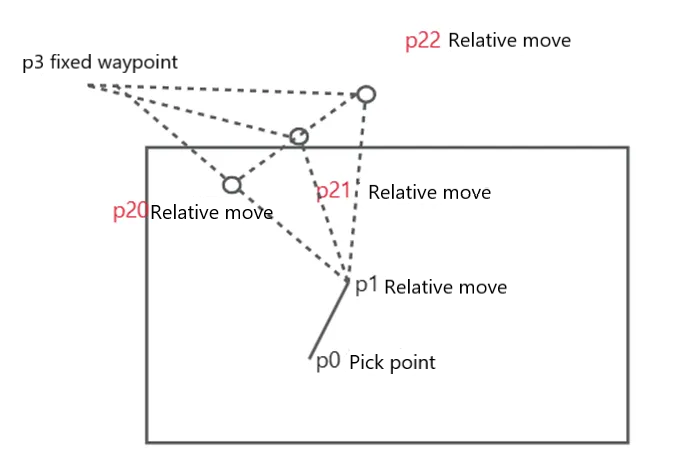
When the “Picking Stage” parameter is set to “Before picking”:
- At the waypoint near the pick point (p1 in the figure), the robot will attempt two waypoints obtained by lifting 2cm/5cm along the z-axis of the tool reference frame;
- At the waypoint far from the pick point (p2 in the figure), the robot will attempt three waypoints in total: p20, p21, and p22.
- p20 is a waypoint on the line directly connecting the fixed waypoint p3 to p1;
- p22 is a waypoint directly above the center of the bin;
- p21 is the mid-waypoint between p20 and p22.
-
When the “Picking Stage” parameter is set to “After picking”:
- At the waypoint near the pick point (p1 in the figure), the robot will attempt four waypoints in total: two obtained by lifting 2cm/5cm along the z-axis of the tool reference frame and two obtained by lifting 2cm/5cm along the z-axis of the robot reference frame;
- At the waypoint far from the pick point (p2 in the figure), the robot behaves the same as when the “Picking Stage” is set to “Before picking”.