I saw that a new step was introduced: “Adaptive Relative Move”.
This step seems to be helpful for depalletizing to only lift a box as high as necessary from a layer based on the height of the box.
Is there also a similar step for placing an object, basically “Adaptive Fixed Point Move”?
Use Case: I would like to pick a box and based on the height of the box, I want to gently place it onto a conveyor belt, such that dependent on the height of the box, the box can be neatly placed onto the conveyor belt.
At the moment, I know two workarounds:
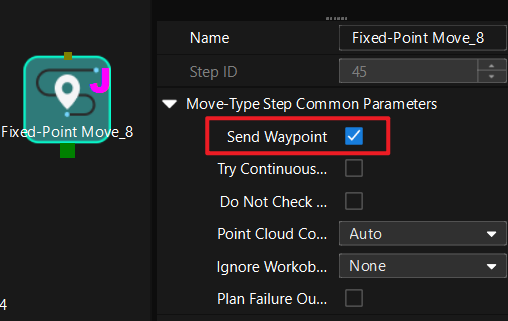
When using Standard Interface I could use a fixed point move placed at the conveyor belt placing point and use a prior “Adaptive Relative Move”. The fixed point move only acts as reference point with “Send Waypoint” deselected as well as disabled collision detection for this step.
Use adapter and adjust the Offset in z-direction based on the box height.
Is there some “Adaptive Fixed Point Move” that can achieve this behavior in a more straightforward manner?
This step, “Adaptive Relative Move,” can adjust the placement scenario. Please refer to this document for more information: Adaptive Relative Move Documentation.
If this does not resolve your question, please inform us.
Thanks for the quick feedback. I am not sure if I misunderstandd something.
When I use “Adaptive Relative Move” relative to the “Next Waypoint” then I agree that the robot will move to my desired position in the “Adaptive Relative Move”. But after reaching the position the robot would continue moving to the “Fixed Point Move”. That is why I mean that I can ignore this point in Standard Interface but in Master Control the robot would crash the box. Or do I misunderstand something?
Let’s say that the robot picks a box of height 100 and I want to place the box, such that the bottom of the box is 50mm above my fixed point position.
The robot moves to the “Adaptive Relative Move” Position (This should be the final position):
I understand the issue now. This step is intended to prevent collisions with another box during depalletizing and palletizing, rather than for adaptive placing.
However, to achieve a similar appearance using the method below, you can:
Use “Adaptive Relative Move” relative to the “previous Waypoint”.
Try to ignore the next fix point, which shows below (increase the “Blend radius” and click “Try Continuously Running through Succeeding Non-Moves”)
Then you’ll notice that the last move will be disregarded. (This is for master control. And for standard interface as you said, you can attempt to exclude sending the last fix point.)
It also works for Master Control. If the “Send Waypoint” is uncheched, this waypoint will not be sent to the robot, therefore the robot will not move to the fixed point.