Hello, I have the following problem:
I trigger MechViz using a PLC via Profinet. with every start of MechViz I have a grippable part calculated. How can I prevent the same part from being approached again and again if the robots failss? My robot cannot grasp a part and withdraws again. After a new trigger, however, the same part is output again and the robot again fails to pick it up, which means it ends up in a continuous loop. I have activated to filter out the pick point in the visual move, but this has no effect.
Many thanks in advance,
Magnus
Hi, you said “after a new trigger, however, the same part is output again”,
here if you mean Mech-Vision also calculated the same grippable result, you‘d better to check the Mech-Vision project.
here if you mean Mech-Vision calculated a different grippable result, but the PLC transported the last grippable result to robot, you‘d better to check the PLC program logic to make sure transport the new result, and also you can clear the last grippable result before you start a new trigger.
Mech Vision is triggered in the workflow of MechViz. Mech Viz is started by the PLC through an adapter. The vision result snt from Mech-Vision to Mech-Viz is the same, because the robot failed to pick the object. How can i prevent, that Mech Viz outputs the same grippable part when i trigger Mech-Viz multiple times in a row?
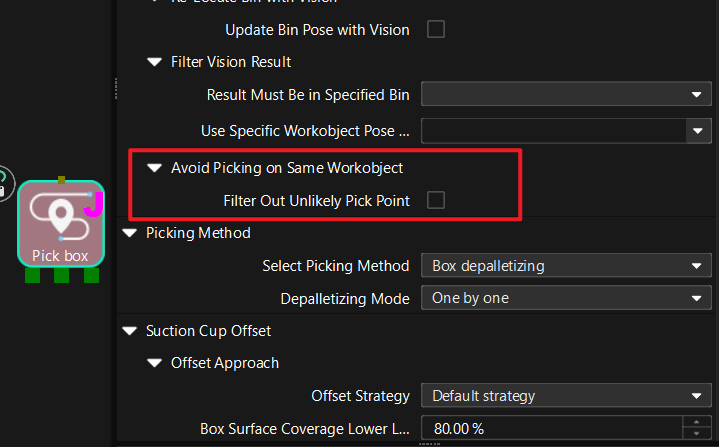
You can try the “Avoid Picking on Same Workobject” in the Vision Move Step.
The Vision Move will record the successfully planned result (in a queue) and avoid picking the same part.
Attention, if the Mech-Viz workflow is not a loop and is triggered by PLC every time, you need to enable “Keep Last Exec State”, to not clear the queue mentioned above.