To save the cycle time, we want to pick several objects after capturing one image.
How should we set the configuration in Mech-Vision and Mech-Viz?
-
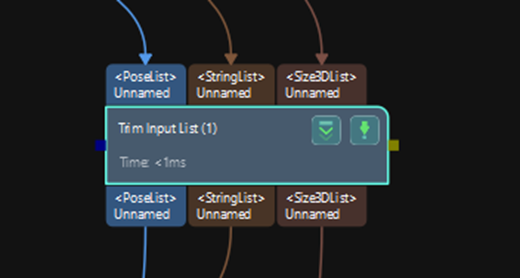
Vision result trimming
It is suggested that each time a certain number of candidates be sent to Mech-Viz for further path planning.
-
Mech-Viz configuration
For the [Vision Move] Step, enable the “Reuse Vision Result” parameter.

Add [Is Vision Result Used Up] Step and select the corresponding vision move step.
After this configuration, Mech-Viz will try to do the path planning for all these 5 pickpoints. But note that not all these pickpoints path planning will succeed.
Three path plannings succeeded and the other two failed.
-
Communication
Here I used a net assistant to simulate communication between the robot and the IPC vision system.
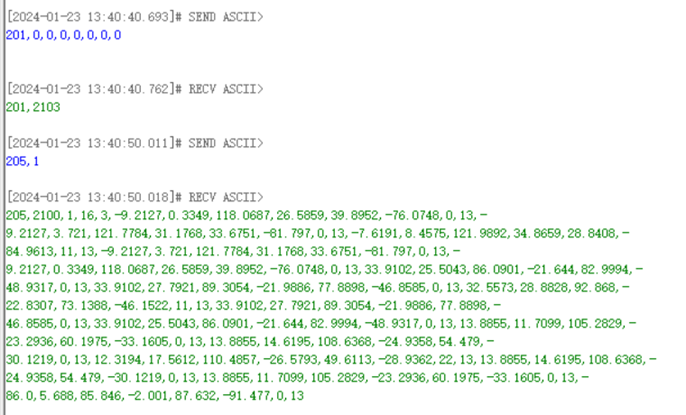
Command 1: Trigger viz
Command 2: Get the planned path from Mech-Viz
Please refer to TCP/IP Interface Commands for detailed command explanations.


Note:
In Mech-Vision, you can change the number of poses to send every time.
But the maximum of poses to send per time is 30, so ensure that the system only sends out necessary poses.

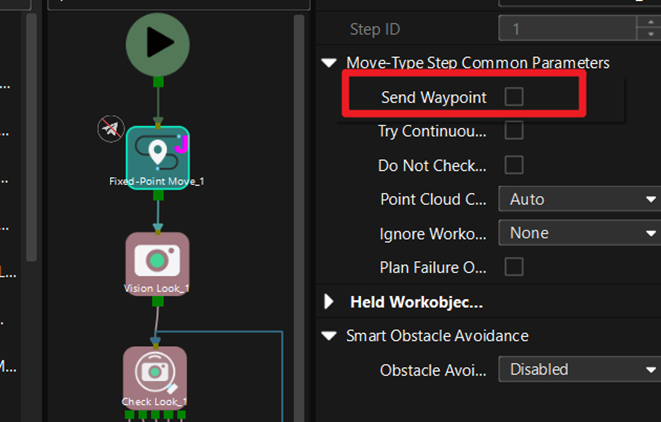
For unnecessary move poses, you can deselect “Send Waypoint”.