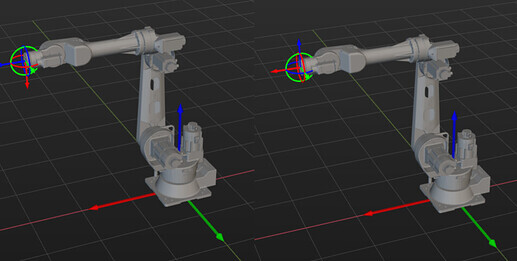
For the robots of some brands such as TURIN, the Z-axis of their flange frames is not pointing outward relative to the flange surface as usual. Instead, the X-axis of the flange reference frame points outward.
To maintain consistency between the flange frame orientation of the robot in Mech-Viz and the actual robot, you can modify the “robot_flange_orientation”: “x/y/z” parameter in the [robot]_algo.json file of the robot model file in Mech-Viz.
For instructions on modifying this parameter, see Robot Flange Frame Orientation manual.