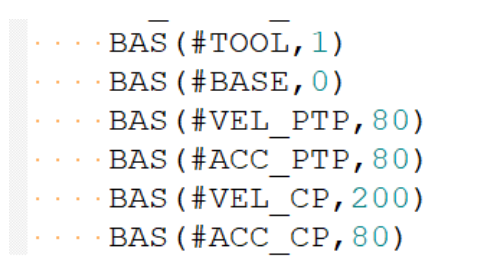
When running the KUKA example program SAMPLE02 through Standard Interface, and the robot reached a waypoint, an error occurred: Velocidad de trayectoria no programada (Unprogrammed trajectory speed).

The waypoints in SAMPLE02 are not newly created waypoints by using the teach pendant, so it is necessary to define the robot velocity before running the example program.