Taking the UR5e robot as an example, the Euler angle convention for the robot is Rotation Vector, as shown in the pendant screenshot below.
![]()
However, in Mech-Viz, the Euler angle convention is sxyz, which does not align with the Euler angle convention of the UR5e robot. To resolve this issue, switch the robot’s Euler angle convention to RPY on the teach pendant by following the instructions below:
-
Click anywhere inside the Tool Position pane on the Move interface on the teach pendant, as shown in the figure below.
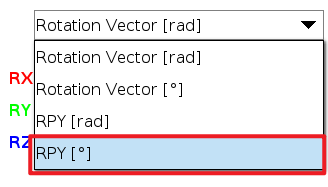
The Euler angle convention option box is displayed in the opened TCP pane, as shown below.
-
From the dropdown menu, select the RPY to correspond with the Euler angle convention sxyz in Mech-Viz.


Note:
From Mech-Viz 1.8.0 onward, Rotation Vectors are also supported in Mech-Viz. Click Robot on the Functional Panel and then select TCP on the Robot pane to find the Rotation Vectors option.
