In the Mech-Eye sensor integration test, the customer encountered the following issue:
The RGB data returned by the captureColorMap or capturePointXYZBGRMap methods represents the values from the previous sensor scan.
In fact, regardless of the duration of the wait time between two captures, what we obtain is always the RGB image from the previous scan (while XYZ data does not have this issue).
Relevant info:
- Scenario example: The first capture is on an empty platform; after placing a pen on the platform, a second capture was performed.
- Software: SDK 2.1.0 with C# API.
- Settings: Default configuration from the attached configuration file.
- Code used:
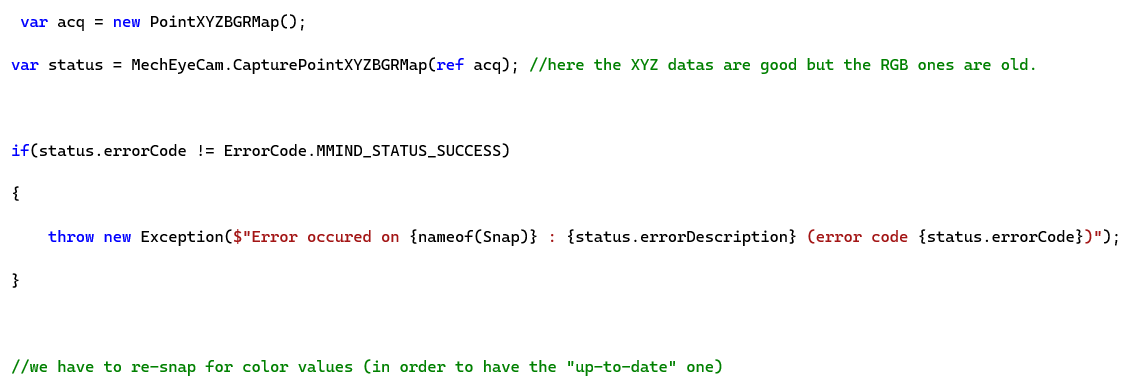
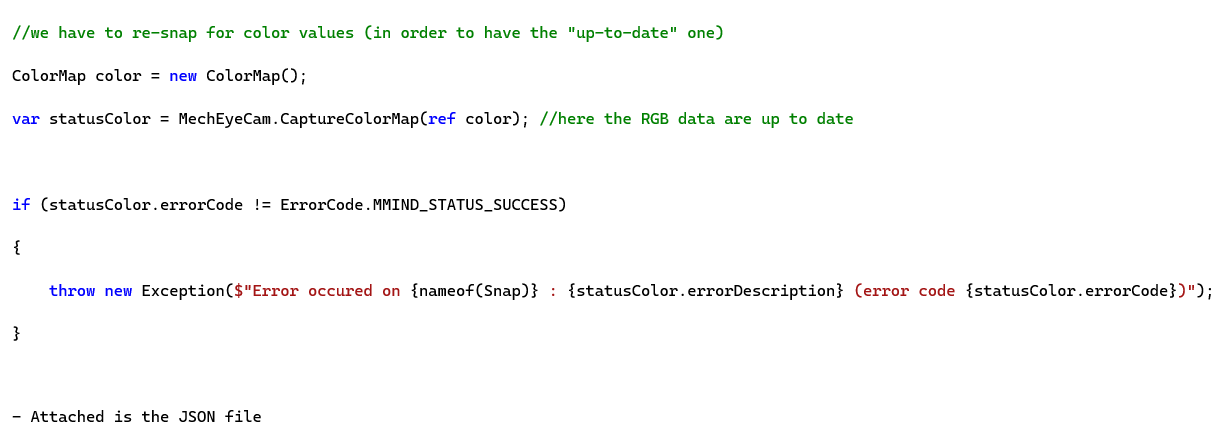
File:
UAM30233A423E002_parameter_group.json (11.4 KB)