Context
In Mech-Viz, when inputting the current joint angles of the robot, the obtained flange pose information significantly differs from the pose information displayed on the actual robot.
Troubleshooting steps
Check if the used TCP information is empty
The TCP represents the current TCP value in the robot’s base reference frame. If the current TCP has data, it can cause the robot to display a pose different from the actual flange pose. When inspecting, it is crucial to ensure the tool number being used by the robot matches the one being examined. (The image below uses Yaskawa as an example.)

Check if the robot origin is correct
Manually move the robot to the current origin pose using the teach pendant. Typically, there are corresponding scale lines on each axis of the robot. Check if these scale lines are aligned. If they are not aligned, the robot origin needs to be recalibrated. (In some robots, the scale lines are not very clear. In such cases, you can use the protrusions at both ends of the axis as scale lines. In this situation, it is helpful to use the official simulation software provided by the robot manufacturer to view the origin position and confirm it with the actual robot.)
Check if the robot’s DH parameters in Mech-Viz are correct
(1) Open the robot parameter file in Mech-Viz: For Mech-Viz versions 1.7.0 and later, right-click on the robot in “Resources” to open the robot parameter folder. Select the folder named by a combination of robot model + “algo.json.”

(2) Checking the robot-side parameters: Typically, robot DH parameters can be viewed by referring to the official website of the robot manufacturer and consulting the corresponding 2D diagrams of the robot body. (The example below uses Yaskawa GP8 as a reference.)
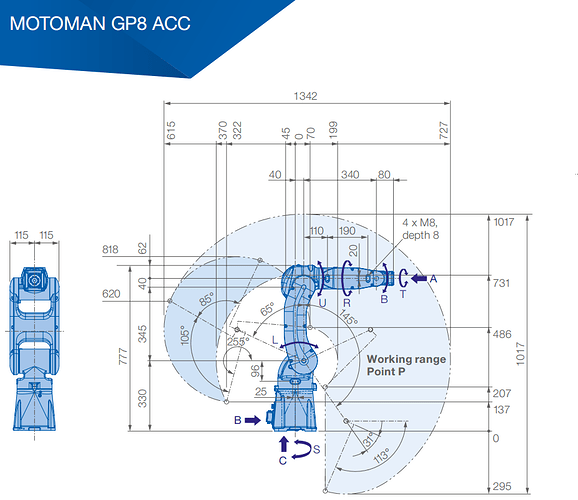
(3) How to refer to diagrams for DH values: (Different types of robots have different viewing methods. The example below is for commonly used industrial robots with six-axis spherical wrist. For other types of robots, please contact Mech-Mind’s technical support.)
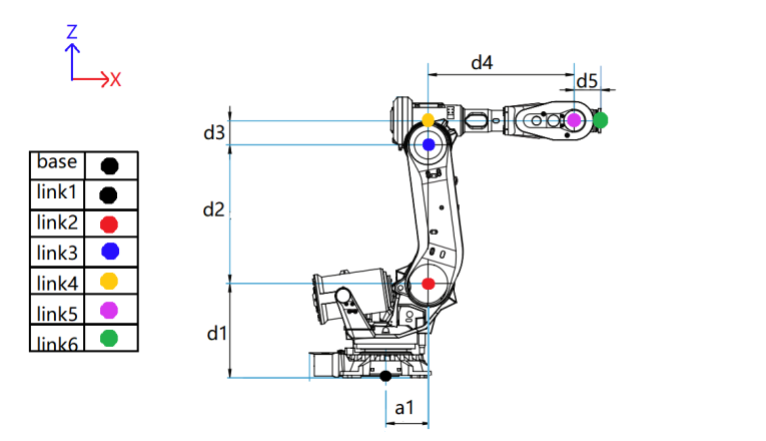
If the values in the Mech-Viz file are inconsistent with the official diagram data, modify them according to the official diagram, save the changes, and restart the software.
Note: If the above steps do not resolve the issue, please contact Mech-Mind’s technical support.