Sometimes it is difficult to pick the object accurately for the suction cup gripper, then the suction gripper will fail to pick up the object. But the object is still there and the pose of the same pick-point of this object is sent to the robot again. Then the suction gripper will try to pick up the object again and again. How to avoid this?
You can enable this option for “Vision Move”
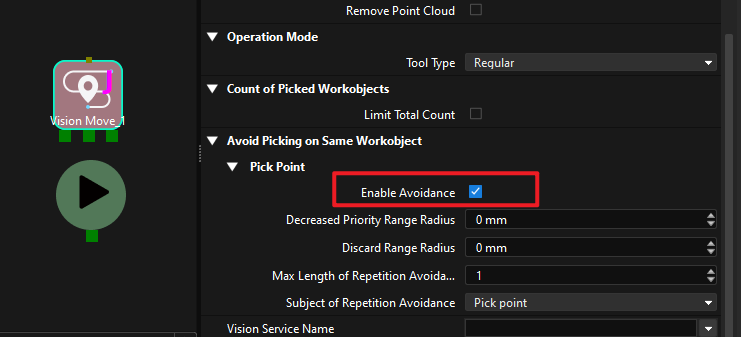
For details of the parameters, you can refer to Regular Tool
For the solution to this issue, refer to docs: The robot attemped to repeatedly pick the same object that already failed to be picked