Camera Mounting Style: EIH
Issue Description: The point cloud stitched using this method does not match the actual distances. I am using virtual camera images. Is there an issue with the setup process?
- When acquiring the point cloud, ensure that the relative position between the workpiece and the robot remains unchanged, and collect point clouds from multiple positions.
- During point cloud registration, it is necessary to transform the point cloud to the robot’s coordinate system.
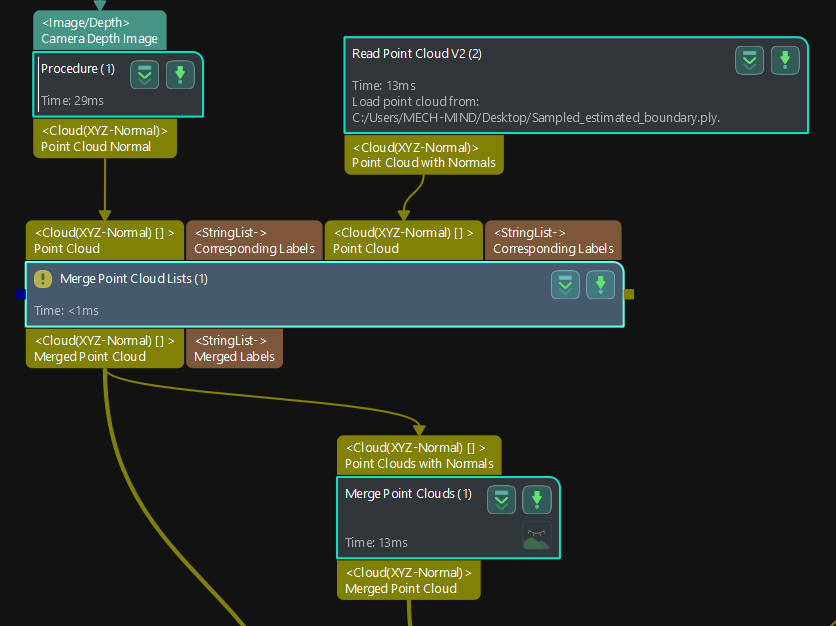
- Merge the two point clouds using the “Merge Data” step and then proceed with the “Merge Point Clouds” step.
When using “Merge Data,” I encounter an error, and “Unpack and Merge Data” doesn’t work either. Is there a dimension that hasn’t been set correctly?


