This project involves two types of incoming material turnover boxes: one is an open-top turnover box, and the other is a lidded turnover box; the point cloud quality is consistently good.
Visual recognition requirements
Identify the turnover box model and calculate the pick point.
Previous approach
There are usually significant gaps among turnover boxes, and we used multiple model edge matching to directly recognize turnover boxes of difference specifications and calculate the pick points. However, due to the similar dimensions of turnover boxes, the multiple matching matching might produce incorrect turnover box specification labels, which made the robot use the wrong gripper.
Currently planned approach
We plan to use an object detection model to identify what specifications individual turnover boxes belong to. However, the prerequisite is to first obtain a mask for each individual turnover box.
Current challenges
After matching, use Step “Extract Point Cloud in 3D Box” provides a complete turnover box point cloud.
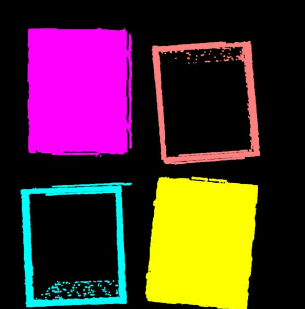
When projecting the 3D point cloud into a 2D image and only applying morphological transformations, if the dilation kernel size is too small, the obtained mask for open-top turnover boxes will be incomplete, and if the dilation kernel size is too large, the mask for turnover boxes is overly extensive.
How can we obtain an appropriate complete mask for open-top/lidded turnover boxes without adding a separate instance segmentation model, thus allowing for the extraction of a color image for object detection?
Point clouds of individual turnover boxes