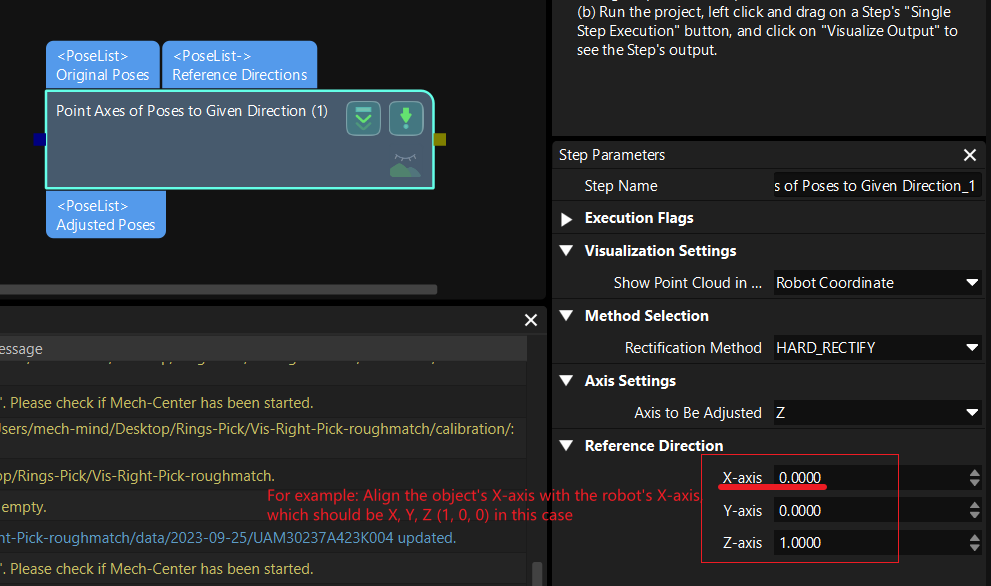
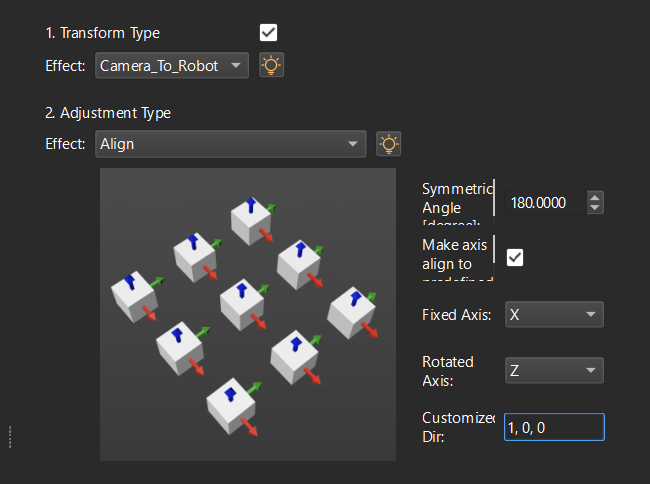
The product is a cylinder, and I’m using Step “Calc Poses and Dimensions from Planar Point Clouds” to get the poses. However, the rz (rotation around the Z-axis) value rotates randomly before grabbing, causing interference with the robot. How can I solve this problem?
Software version: 1.7.1
Camera: PRO S
Robot model: KUKA