In the calibration ball compensation scheme, how is the locating of the circular calibration balls specifically achieved?
Step 1: Ensure the completeness of the calibration sphere’s point cloud. First, optimize the camera exposure parameters to ensure the completeness of the calibration sphere’s point cloud without significant fluctuations.

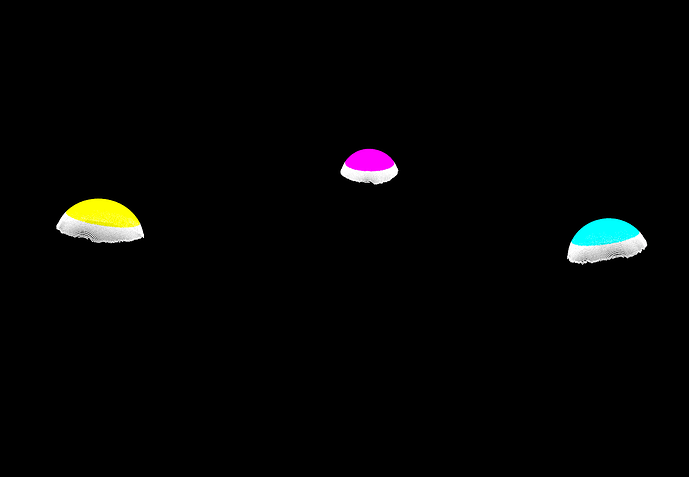
Step 2: Use 3D matching to roughly get the poses of the calibration spheres, and then use the “Extract 3D Points in Cylinder” step to extract the point cloud of the sphere tops. The main purpose is to reduce errors caused by fluctuations in the edge point cloud of the calibration spheres.
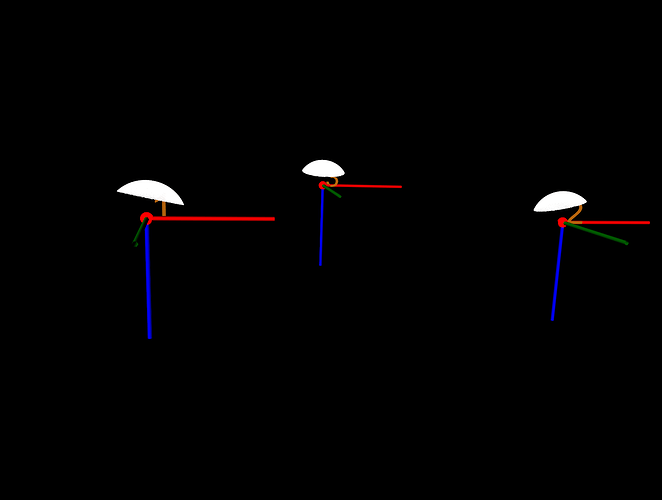
Step 3: Precisely locate the calibration balls using Step “Locate Calibration Spheres” to determine the poses of the sphere’s centers.