After I added the bin model and dyamic bin function. For the same pick point which robot can pick normally before, mech viz showed this error:

In the log it shows “Vision pose not in any box”, which means this pickpose is outside the valid range of the bin model. By default, once the bin model is added, it will automatically set the effective range for pose as “in the bin”
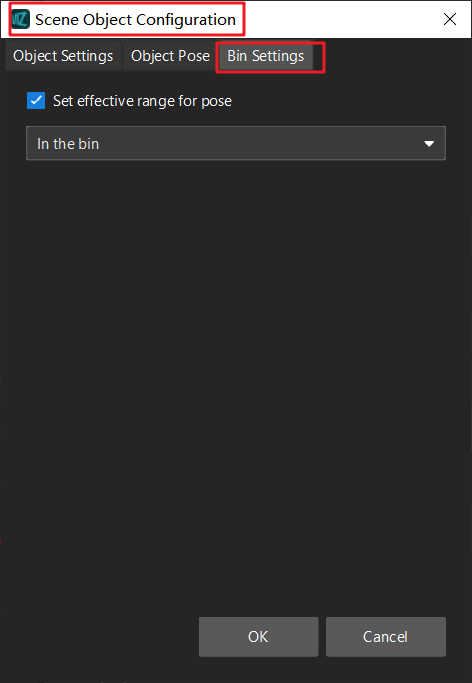
To solve this issue you can use the following setting accordingly based on your project senario:

