Software Version: Mech-Vision (1.7.2), Mech-Viz (1.7.2), Mech-Eye Viewer (2.1.0)
Camera Model and Firmware Version: (LSR L V4 version)
Robot Model: (ABB IRB-6700-205)
Photo Method: (ETH)
Problem Description:
I want to determine if the foam tray is inclined or not using point cloud data, and if it exceeds the set angle, an alarm should be triggered.
Methods attempted:
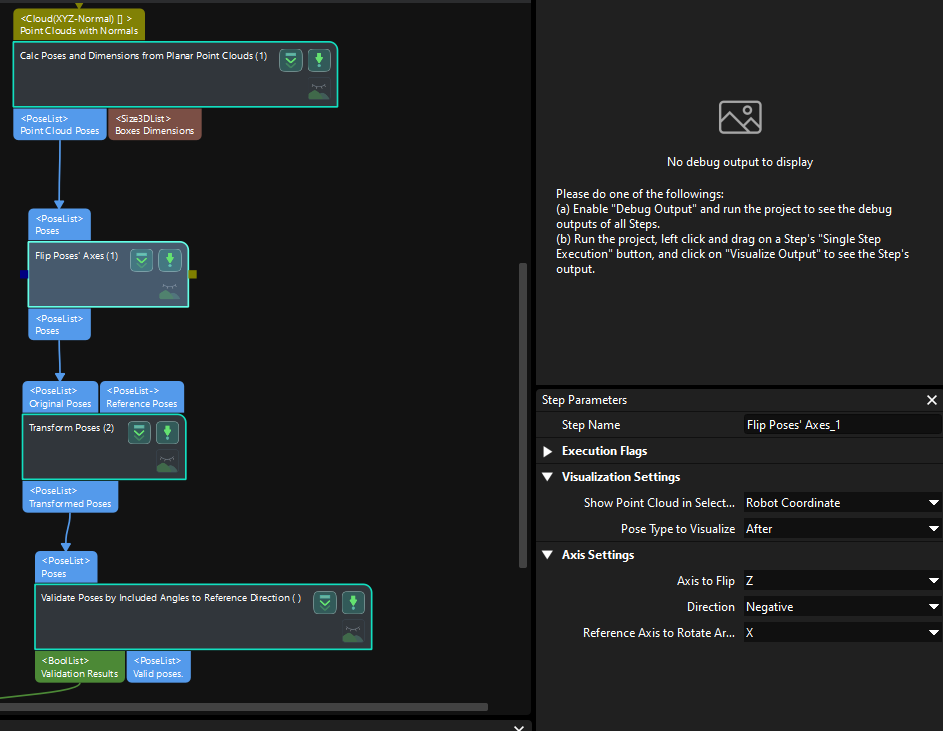
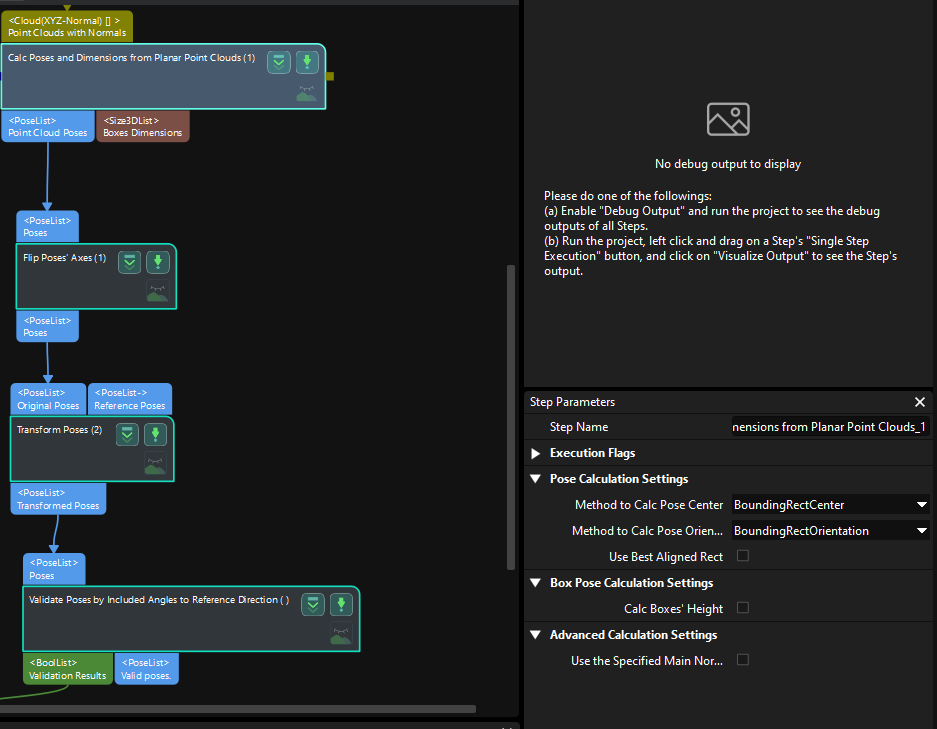
Attempted to extract the edge of the foam tray and use Step “Calc Poses and Dimensions from Planar Point Clouds”. Then fixed in the Z direction and convert the pose to the robot coordinate system for comparison. Found that regardless of whether it is inclined or not, it will be considered to exceed the set value.