Hello,
Currently, I am using a standard interface to connect a robotic arm (ABB IRB1300) and Mech-Vision. I am testing the ABB grabbing sample program “sample_vision1.”
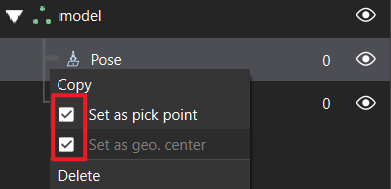
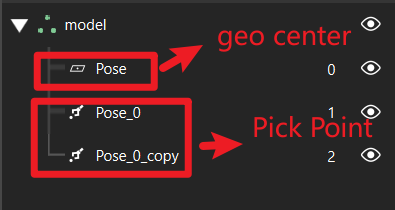
After performing 3D model matching with Mech-Vision, the result generated is the center point of the workpiece rather than the pick points.
- How can I generate pick points for the robot?
- Should I choose predefined pick points in coarse matching and fine matching instead of the workpiece’s center point?
- If there are multiple pick points on a workpiece, how can I instruct Mech-Vision to select the best pick point?