We’ve set up multiple pick points on the pointcloud model, and we’ve used a method to map to multiple pick points. Next, we’d like the robot to move to each point in sequence. How can we achieve the ordering of the pick points? If we want to categorize the capture points, how can we achieve that?
You can add label when you build the model, which shows below:
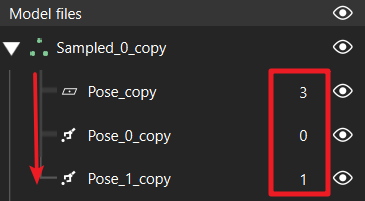
The red square is the label, and the arrow shows the order, which is the sequence of picking.