Scenario
A vision-guided robot is employed to pick up a sack and place it over a sack opener. From its elevated position, the robot then applies pressure to the sack, engaging the sack opener to cut the sack open from above. After the material retained in the sack is discharged, the robot will place the empty sack in a predetermined location. The image below shows a common sack opener.

-
Problem:
The sack opener is equipped with fixed blades, requiring the robot to exert pressure on the picked sack to initiate the opening process. To ensure complete and effective opening, the blades must penetrate the sack to a sufficient depth. However, challenges can arise if the materials within the sack have coalesced into a solid block, hindering the blades’ progress. In such cases, the robot is programmed to detect unusually high resistance, which triggers an alarm. This alarm prompts the process to halt automatically, preventing any potential damage to the equipment or materials.

-
Solution:
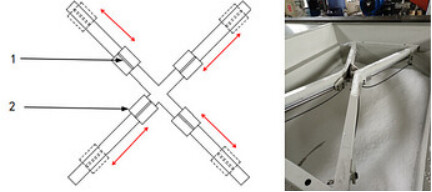
Drive units (as shown in Position 2 in the figure on the right) can be installed beneath the blades (as shown in Position 1 in the figure on the right), allowing the blades to move in two different directions. In other words, the four blades can all move in two directions.
In practice, the robot begins by picking up a sack and placing it over the sack opener. The drive units installed beneath the blades come into play, enabling the blades to move in two directions reciprocally. This approach ensures that the blades create a longer slit in the sack, which facilitates the efficient discharge of materials and effectively breaks apart any formed blocks within the sack. As a result, the robot no longer needs to exert excessive pressure on the sack to achieve the cutting process.
In addition, a rotary sack opener also yields favorable results. However, it’s important to be aware that the sacks may become entangled around the rotary blades, which can affect the subsequent cutting.
-
Problem:
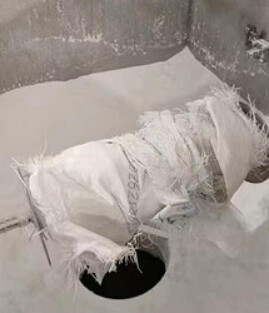
Some sack openers are designed to cut open sacks from the center to the edge. However, for this process to work effectively, the center of the sack must align precisely with the center of the opener. When the center of the sack does not align with the opener’s center, the blades may not fully cut the sack from the center to its four corners. As a result, the corner farthest from the opener’s center often remains partially intact.
In such cases, the issue is typically attributed to the imprecise center point of the sack identified by the camera. -
Solution:
-
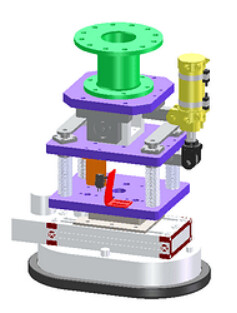
A shaking device can be introduced as part of the gripper mechanism. During the sack-opening process, the shaking device is activated, providing continuous, controlled vibrations to ensure that all materials within the sack are thoroughly discharged.
-
Plan the robot’s motion and pose rationally, as shown below.

-
Selecting a suitable sack opener is also crucial. See the problem and solution mentioned above for more details.
-
Problem:
When sacks are arranged in the form of a pallet, they may be titled or overlap each other. As a result, the robot’s gripper may not fit closely with the sack and thus fail to pick it up.

-
Solution:
Adding an adapter above the gripper or increasing the thickness of the gripper’s sponge are practical solutions to enhancing the gripper’s ability to adapt to tilted sacks.
- This is helpful.
- This does not solve my issue.