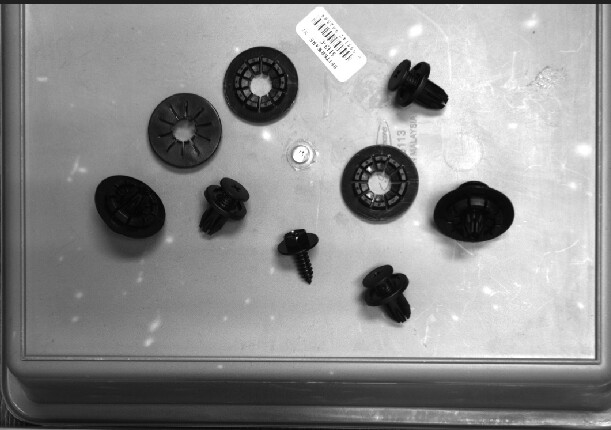
What would be the best solution for matching these small plastic bolts and gromets? Would UHP be suitable? Or does it require deep learning? These workpieces are rather small (~ 10mm diameter and ~5mm thickness)
Using 3D matching on these small workpieces are difficult. The camera used was Nano ETH @450 mm working distance
I think the camera you are using now is suitable.Why is it difficult to 3D match these parts? Can you describe more about the problems you encountered?
In matching model and pick point editor you can choose & select & delete the point cloud.
Select the point cloud you imported in the resource list and trim it with these tools on the side.
I tried to capture the point cloud and import into this “Matching Model and Pick Point Editor”. However, when doing 3D matching (Coarse + Fine), it will not match correctly.
Could it be because the workpieces are too small and indistinguishable from the background?
The Mech-Nano is sufficient to differentiate between a 7.5mm thick workpiece, so could you please take a detailed screenshot of the point cloud you have entered into the 3D Matching step and the matching template point cloud? From the video, it does not appear that you have removed the background from the template.
Removing the background from the matching template can be done automatically or manually. Based on what you have seen in your video, I would suggest that you take care of this manually again.
@YiGao This are some images of the steps we took with the Nano camera. It shows the automatic way of creating the point cloud and the manual way. Eventually the point clouds from the model editor are used in the 3D matching step. However, it was difficult to be matched.
I see in your second video that the matching template called “GrommentNANO_copy” should work. Have you tried matching with this template?
In addition, the point cloud per processing process in your Mech-Vision project can refer to the following flow, these steps help filter out the background: